Velocity Planner: 속도 프로파일 생성
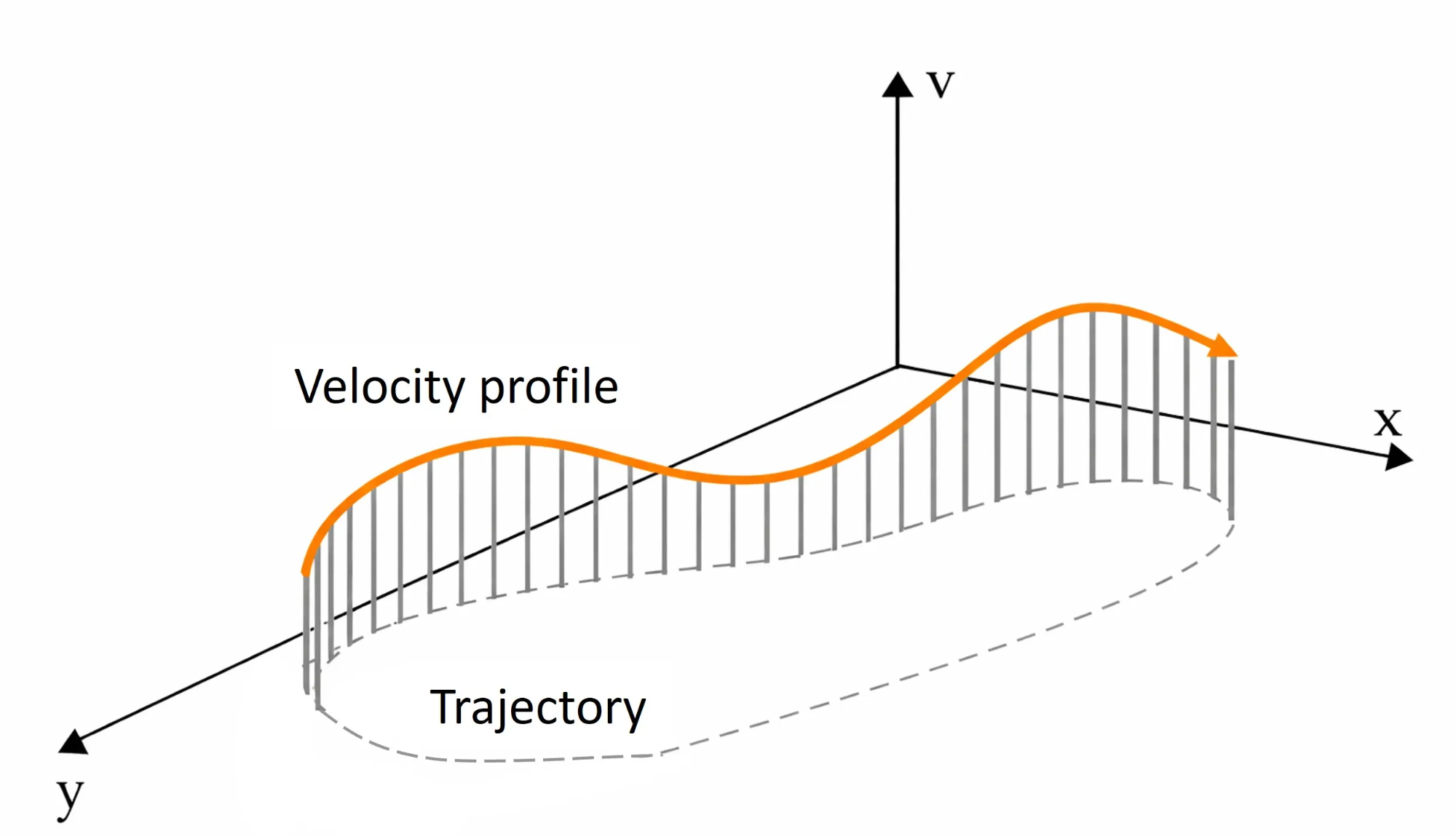
Velocity Planner는 주어진 경로(Waypoints)에 대해 차량의 동역학적 제약을 고려하여 최적의 속도 프로파일을 생성하는 모듈입니다. 차량의 물리적 임계치를 초과하지 않는 범위 내에서 주행 효율을 극대화함과 동시에, 주행 안정성을 확보하는 것을 목표로 합니다.
| 특징 | 설명 |
|---|---|
| Physics-based 제약 | 타이어 마찰, 모터/브레이크 한계, 공기 저항 고려 |
| Forward-Backward Solver | 가속 & 감속 제약을 고려하는 속도 계획 알고리즘 |
| GGV Diagram | 속도에 따른 종/횡 가속 한계를 GGV 다이어그램으로 표현 |
| Real-time | 빠른 계산 (analytical solution) |
| Path-dependent | 곡률(curvature)에 따른 동적 속도 조정 |
Physics Constraints (물리 기반 제약 모델)
Friction Circle (타이어 가속 제약)
타이어가 제공할 수 있는 총 가속도는 마찰 한계로 제한됩니다. 종방향(가속·제동)과 횡방향(코너링) 가속도는 독립적으로 발생할 수 없으며, 그 조합은 일정한 한계를 갖습니다. 이러한 제약을 일반화하여 표현한 것이 Generalized Friction Circle(Ellipse) 모델입니다.
\[\left(\frac{a_x}{a_{x,max}}\right)^p + \left(\frac{a_y}{a_{y,max}}\right)^p \leq 1\]- $a_x$ : 종방향 가속도 (가속/감속)
- $a_y$ : 횡방향 가속도 (코너링)
- $a_{x,max}$ : 타이어 종가속 한계
- $a_{y,max}$ : 타이어 횡가속 한계
- $p$ : dynamic model exponent (combined-slip 형태를 결정하며, 일반적으로 1.0~2.0 값을 가집니다)
$p$가 클수록 planner는 더 공격적인 가속을 허용하며, 값에 따라 friction circle의 형태는 다음과 같습니다.
| $p$ | Friction Circle 형태 | 특성 |
|---|---|---|
| 1.0 | Diamond (◇) | 매우 보수적, 코너에서 가속 제한 강함 |
| 1.5 | 중간 | 안정성과 성능의 균형 |
| 2.0 | Circle / Ellipse (○) | 공격적, 코너 중 가속 허용 |
가속도 계산
주행 중 사용 중인 횡가속도는 곡률로부터 계산됩니다.
\[a_{y,used} = \frac{v^2}{r}\]이를 Friction 제약에 대입하면, 현재 상태에서 사용 가능한 가용 종방향 가속도는 다음과 같습니다.
\[a_{x,avail} = a_{x,max} \cdot \left(1 - \left(\frac{a_{y,used}}{a_{y,max}}\right)^p\right)^{1/p}\]- 직선 구간 $(a_y = 0)$에서는 $a_x = a_{x,max}$이므로, 최대 가속이 가능합니다.
- 코너 진입 ($a_y$ 증가)에서는 $a_x$가 줄어드므로, 가속이 제한됩니다.
따라서, 조향을 많이 할수록 가능한 가속값이 작아짐을 알 수 있습니다.
공기저항
속도가 증가함에 따라 공기 저항에 의해 추가적인 감속이 발생합니다.
\[a_{drag} = -\frac{c_d \cdot v^2}{m_{veh}}\] \[c_d = 0.5 \cdot C_w \cdot A_{front} \cdot \rho_{air}\]- $c_d$ : 항력 계수
- $m_{veh}$ : 차량 질량
따라서, 공기저항은 속도 증가에 따라 급격히 커지며, 고속 영역에서 가속 성능을 제한하고 타이어 마찰 제약과 함께 최종 가속 한계를 결정합니다.
알고리즘 (Forward-Backward Solver)
원리 (Two-pass Velocity Planning)
경로를 따라 주행 가능한 속도를 계산하기 위해 Forward-Backward two-pass 알고리즘을 사용합니다.
- Forward Pass: 차량의 가속능력을 고려하여, 현재 위치에서 다음 위치까지 가속 가능한 최대 속도를 계산합니다.
- Backward Pass: 차량의 감속(제동)능력을 고려하여, 다음 위치에 안전하게 도달할 수 있는 최대 허용 속도를 역방향으로 계산합니다.
각 지점의 최종 속도는 Forward와 Backward 결과 중 더 작은 값을 선택함으로써, 모든 동역학적 제약을 만족하는 속도 프로파일을 생성합니다.
진행 단계
Step 1: 초기 속도 프로파일 (Lateral G 제약)
곡률($\kappa$)이 주어진 경로에서, 타이어의 횡가속 한계를 만족하는 최대 속도를 계산합니다.
\[v_{max}(i) = \sqrt{\frac{a_{y,max}}{|\kappa(i)|}}\]- $a_{y,max}$ : 타이어의 최대 횡방향 가속도
- $\kappa(i)$ : $i$번째 지점의 곡률 (1/반경)
해당 단계는 코너링 한계만 고려한 이론적 최대 속도를 제공합니다.
Step 2: Forward Pass (가속 제한)
시작 지점부터 경로를 따라 진행하면서, 이용 가능한 종방향 가속도를 고려해 다음 지점의 최대 속도를 계산합니다.
\[v_{i+1} = \sqrt{v_i^2 + 2 \cdot a_{x,avail} \cdot \Delta s}\]- $a_{x,avail}$ : 타이어, 모터, 공기저항을 고려한 이용 가능한 종방향 가속도
- $\Delta s$ : $i \rightarrow i+1$ 지점 간 거리
해당 단계는 차량이 실제 가속할 수 있는 범위를 반영합니다.
Step 3: Backward Pass (감속 제한)
경로의 끝점에서 시작점 방향으로 역행하면서, 브레이크 성능을 고려해 안전한 감속이 가능한 속도를 계산합니다.
\[v_i = \sqrt{v_{i+1}^2 + 2 \cdot a_{x,brake} \cdot \Delta s}\]다음 지점에서 요구되는 속도를 만족하기 위해, 미리 감속이 가능하도록 보장합니다.
Step 4: 최종 속도 결정
각 지점에서 Forward와 Backward Pass의 결과 중 더 작은 값을 선택합니다.
\[v_{final}(i) = \min(v_{forward}(i), v_{backward}(i))\]해당 과정을 통해 가속 한계, 감속 한계, 타이어 마찰 제약, 공기 저항을 모두 만족하는 속도 프로파일을 생성할 수 있습니다.
GGV Diagram 및 구동계 제약
속도에 따른 가속 성능 변화를 반영하기 위해, GGV Diagram과 모터 및 브레이크 제약을 함께 사용합니다.
GGV Diagram
속도에 따라 차량이 생성할 수 있는 최대 종방향 가속도와 최대 횡방향 가속도를 정리한 표는 아래와 같습니다.
| 속도 (v) | 최대 종가속 ($a_{x,max}$) | 최대 횡가속 ($a_{y,max}$) |
|---|---|---|
| 0 m/s | 7.0 m/s² | 5.8 m/s² |
| 4 m/s | 7.0 m/s² | 5.8 m/s² |
| 8 m/s | 7.0 m/s² | 5.8 m/s² |
| 12 m/s | 7.0 m/s² | 5.8 m/s² |
Friction Circle(Ellipse)의 $a_{x,max}$와 $a_{y,max}$의 값을 속도별로 제공함으로써, 코너링 한계 및 가속 계산의 기본 입력 데이터로 사용할 수 있습니다.
구동계 제약 (Motor / Brake Limits)
타이어가 허용하더라도, 실제 가속/감속 성능은 모터 출력 및 브레이크 성능에 의해 추가적으로 제한됩니다.
Motor Acceleration Limit (ax_max_machines.csv):
| 속도 | 최대 모터 가속도 |
|---|---|
| 0-15 m/s | 4.2 m/s² |
모터가 생성할 수 있는 최대 구동 가속도로, 직선 가속시 실제 가속 성능의 상한을 결정합니다.
Brake Deceleration Limit (b_ax_max_machines.csv):
| 속도 | 최대 브레이크 감속도 |
|---|---|
| 0-15 m/s | -7.0 m/s² |
브레이크의 최대 감속 성능으로, Backward pass에서 감속 가능 여부를 판단하는데 사용합니다.
알고리즘에서의 통합 방식
Forward Pass (가속)
\[a_{x,avail} = \min(a_{x,tires}, a_{x,motor}) + a_{drag}\]타이어 마찰 한계와 모터 성능 중 더 작은 값을 가속 상한으로 선택하고, 여기에 공기 저항으로 인한 감속 항을 추가하여 실제 이용 가능한 종방향 가속도를 계산합니다.
Backward Pass (감속)
\[a_{x,avail} = \min(a_{x,tires}, a_{x,brake}) + a_{drag}\]타이어 제약과 브레이크 성능을 동시에 고려하여 감속 한계를 계산합니다. 여기에 속도에 비례해 증가하는 공기 저항이 추가되어 고속 영역에서의 유효 감속 성능이 변화합니다.
구현 및 사용
메인 함수 calc_vel_profile()에 필요한 입력(ggv, kappa, el_lengths 등)과 설정 옵션을 아래와 같이 구성합니다.
1
2
3
4
5
6
7
8
9
10
11
12
13
vx_profile = calc_vel_profile(
ggv=ggv, # g-g diagram
ax_max_machines=ax_max, # 모터 한계
b_ax_max_machines=b_ax_max, # 브레이크 한계
kappa=kappa, # 곡률 배열
el_lengths=el_lengths, # 웨이포인트 간 거리
closed=True/False, # Closed loop 여부
v_max=12.0, # 최대 속도
v_start=cur_v, # 시작 속도 (open loop만)
dyn_model_exp=1.0,
drag_coeff=0.0136,
m_veh=3.5
)
사용 시나리오
Raceline optimization (offline)
트랙 한 바퀴를 대상으로 closed=True 설정을 사용하여, 속도 프로파일을 계산합니다. 한번 계산 후 저장된 결과는 이후 주행에 재사용됩니다.
Local planning (runtime)
closed=False 설정을 사용하여, 현재 차량 위치부터 전방의 일정 구간에 대해서만 속도를 계산합니다. v_start=현재속도로 사용하여, 주행 중 주기적으로 속도 프로파일을 재계산함으로써 정적 장애물과 같은 환경 변화에 대응할 수 있습니다.
파라미터 튜닝
파라미터 파일
차량 파라미터: config/{CAR_NAME}/racecar_f110.ini
1
2
3
4
5
6
7
8
9
10
[GENERAL_OPTIONS]
veh_params = {
"v_max": 12.0, # 최대 속도 (m/s)
"mass": 3.5, # 차량 질량 (kg)
"dragcoeff": 0.0136 # 공기 저항 계수
}
vel_calc_opts = {
"dyn_model_exp": 1.0, # Diamond model
"vel_profile_conv_filt_window": 51 # Filter window (홀수)
}
GGV Diagram: config/{CAR_NAME}/veh_dyn_info/ggv.csv
# v_mps, ax_max_mps2, ay_max_mps2
0.0, 7.0, 5.8
4.0, 7.0, 5.8
8.0, 7.0, 5.8
12.0, 7.0, 5.8
모터: config/{CAR_NAME}/veh_dyn_info/ax_max_machines.csv
# v_mps, ax_max_machines_mps2
0.0, 4.2
4.0, 4.2
8.0, 4.2
12.0, 4.2
튜닝 가이드
최대 속도
1
self.v_max = 12.0 # → 15.0 (더 빠르게)
직선 구간에서 주행 속도가 향상되지만, 코너 진입 속도 또한 증가하므로 주행 안정성에 대한 추가적인 주의가 필요합니다.
코너 속도 (횡가속 한계)
1
self.a_y_max = 5.8 # → 6.5 (코너 속도 증가)
코너 구간에서 더 높은 속도를 유지할 수 있어 코너링 성능이 향상됩니다. 그러나 타이어 슬립이나 언더스티어를 유발할 수 있으므로, 실제 타이어 성능을 기반으로 조정해야 합니다.
가속 (모터 성능)
1
self.ax_max_motor = 4.2 # → 5.0 (더 빠른 가속)
공격적인 주행이 가능해지지만, 모터 및 배터리의 물리적 한계를 초과하지 않도록 주의가 필요합니다.
감속 (브레이크 성능)
1
self.ax_max_brake = 7.0 # → 8.0 (더 강한 제동)
제동 거리가 감소하여 보다 늦은 제동이 가능해집니다. 그러나 급제동시 차량의 state가 불안정해질 수 있으므로, 안정성을 고려한 조정이 필요합니다.
Friction shape (dynamic model exponent)
1
2
3
self.dyn_model_exp = 1.0 # Diamond model (보수적)
# → 1.5 # 중간
# → 2.0 # Circle model (공격적)
dyn_model_exp는 Friction Circle의 형태를 결정하는 파라미터입니다. 일반적으로 안정성을 우선하는 경우에는 1.0~1.3 범위가 권장되며, 성능을 우선하는 경우에는 1.5~2.0 범위의 값을 사용하는 것이 적절합니다.
Moving Average Filter (global)
1
2
filt_window = 51 # → 31 (덜 부드러움, 더 공격적)
# → 71 (더 부드러움, 더 보수적)
필터의 윈도우 크기가 클수록 속도 변화가 완만해져 주행이 부드러워지지만, 반응 속도는 감소합니다.
Acceleration Filter (local)
1
2
3
4
5
6
7
8
alpha = 0.2 # → 0.5 (더 빠른 응답)
# → 0.1 (더 부드러운 응답)
# 가속/감속 비율 조정
if self.filtered_acc > 0:
target_speed = self.cur_v + self.filtered_acc / 8.0 # ← 이 값 조정
else:
target_speed = self.cur_v + self.filtered_acc / 1.4 # ← 이 값 조정
차량의 가속 및 감속 응답성을 조절하는 역할로, alpha를 증가시키면 반응이 빨라지지만 속도 변화가 급격해집니다.
Troubleshooting
속도가 너무 보수적인 경우
코너 및 직선 구간에서 예상보다 낮은 속도로 주행한다면, 원인은 다음과 같습니다.
- GGV에 설정된 가속 한계값이 너무 낮음
dyn_model_exp값이 너무 작음 (1.0)- 속도 필터 윈도우의 크기가 너무 큼
해결 방안:
1
2
3
4
5
6
7
8
# 1. GGV 증가
self.a_y_max = 5.8 # → 6.5
# 2. Dynamic model 조정
self.dyn_model_exp = 1.0 # → 1.5
# 3. 필터 감소
filt_window = 51 # → 31
속도가 불안정한 경우
속도가 주행 중 심하게 진동하거나 불규칙하게 변한다면, 원인은 다음과 같습니다.
- 필터링이 충분하지 않음
- 경로(waypoints)가 불안정
- 곡률(kappa) 계산 오류
해결 방안:
1
2
3
4
5
6
7
8
# 1. 필터 증가
filt_window = 31 # → 51
# 2. Alpha 감소 (local)
alpha = 0.5 # → 0.2
# 3. 곡률 스무딩
kappa = smooth_curvature(kappa, window=5)
코너에서 언더/오버스티어인 경우
코너 구간에서 타이어가 미끄러지거나 차량이 경로를 이탈한다면, 원인은 다음과 같습니다.
a_y_max가 실제 타이어 성능보다 과도하게 설정됨dyn_model_exp값이 너무 큼 (2.0)- 노면 마찰 계수 변화가 고려되지 않음
해결 방안:
1
2
3
4
5
6
7
8
# 1. 횡가속 한계 감소
self.a_y_max = 6.5 # → 5.5
# 2. Dynamic model 보수적으로
self.dyn_model_exp = 2.0 # → 1.0
# 3. 안전 마진 적용
self.a_y_max *= 0.9 # 10% 마진
마무리
이 글에서는 Velocity Planner의 물리 기반 제약 모델, Forward-Backward 알고리즘, GGV Diagram을 활용한 속도 프로파일 생성 방법을 다뤘습니다.
핵심 포인트:
- Friction Circle을 통해 타이어의 종/횡 가속 한계를 모델링합니다.
- Forward-Backward two-pass 알고리즘으로 가속/감속 제약을 모두 만족하는 속도를 계산합니다.
- 파라미터 튜닝을 통해 보수적/공격적 주행 특성을 조절할 수 있습니다.
Reference
- Trajectory Planning Helpers: https://github.com/TUMFTM/trajectory_planning_helpers
- Original Paper: “Minimum Curvature Trajectory Planning and Control for an Autonomous Race Car”
- Friction Circle: https://driver61.com/uni/friction-circle