Racing-Stack 원격 실행 가이드: 네트워크·SSH·Docker

Racing-Stack 원격 실행 가이드: 네트워크·SSH·Docker
Racing-Stack을 실제 운용할 때 필요한 원격 실행 환경 설정과 실행 순서를 정리했습니다. 네트워크 설정 → SSH 접속 → Docker 접속 순서로 진행하면 됩니다.
1. 통신 네트워크
Local PC ↔ 차량 간 통신을 위해 먼저 네트워크를 확인합니다.
1-1. 네트워크 확인
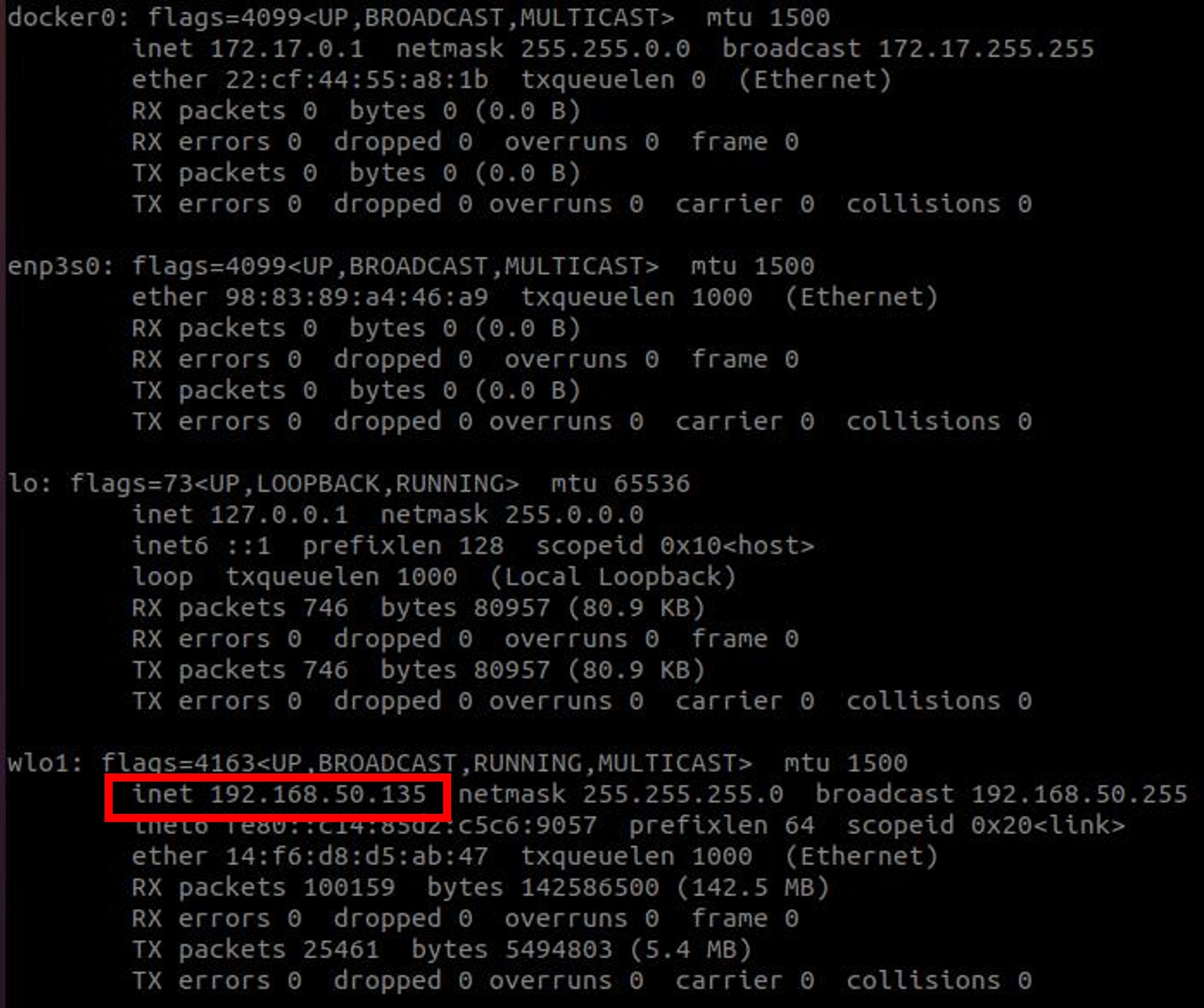
ifconfig로 현재 IP 주소를 확인합니다.- Local PC와 차량은 반드시 같은 네트워크(Wi‑Fi)에 연결되어 있어야 합니다.
ping Car_ip로 Local PC에서 차량에 통신이 가능한지 확인합니다.- 응답이 없다면 Car IP가 잘못되었거나, 같은 네트워크가 아니거나, 차량 전원이 꺼져 있는 상태일 수 있습니다.
1-2. 네트워크 설정
확인한 IP 주소를 기반으로 Local PC의 bashrc에 네트워크 설정을 추가합니다.
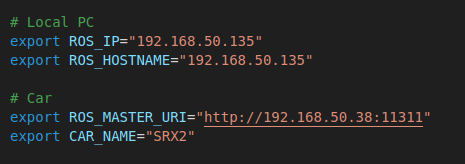
- Local PC 설정
ROS_IP/ROS_HOSTNAME: 다른 ROS 노드가 접속할 수 있도록 자신의 네트워크 주소를 명시합니다.
1
2
export ROS_IP="Local PC ip"
export ROS_HOSTNAME="Local PC ip"
- 차량(Car) 설정
ROS_MASTER_URI: ROS master가 실행 중인 위치(주소)를 명시합니다.
1
export ROS_MASTER_URI="http://Car_ip:11311"
2. 차량 원격 접속 (SSH)
원격 접속은 기본적으로 ssh를 사용합니다.
1
ssh 사용자명@Car_ip
자주 사용하는 옵션은 다음과 같습니다.
-t: 원격 세션에 터미널을 강제로 할당합니다. (docker 실행, roslaunch 등 interactive 명령어에 필요)-X: 원격 GUI를 Local PC로 전달합니다. (rviz, rqt 등)-C: ssh 통신 데이터를 압축합니다.
비밀번호 입력 자동화 (sshpass)
1
sshpass -p 'password' ssh 사용자명@Car_ip
아래처럼 bashrc에 alias를 등록하면 더 쉽게 원격 접속을 사용할 수 있습니다.
1
alias 원하는_명령어="sshpass -p 'password' ssh -t -X -C 사용자명@Car_ip"
3. 차량 Docker 접속
SSH로 차량에 접속한 뒤, Docker 컨테이너를 실행하고 접속합니다.
- 컨테이너 실행
1
docker start docker_name
- 컨테이너 접속
1
docker exec -it docker_name bash
주의: GUI 권한은 SSH로 최초 접속한 터미널에만 적용됩니다. 이후에 새로 연 터미널에서는 GUI가 보이지 않을 수 있습니다.
xeyes로 GUI 권한을 먼저 확인하는 것이 좋습니다.
마무리
Racing-Stack 원격 실행은 네트워크 설정 → SSH 접속 → Docker 접속 순서로 진행하면 안정적으로 사용할 수 있습니다. 특히 네트워크 주소와 ROS 환경 변수를 정확히 설정하는 것이 중요하며, GUI 사용 여부에 따라 SSH 옵션과 터미널 선택을 신경 써야 합니다.
This post is licensed under CC BY 4.0 by the author.