base_link 기준 센서 TF 설정 가이드
들어가며
로봇을 개발하다 보면 가장 먼저 마주치는 문제 중 하나가 바로 센서 좌표계 설정입니다. LiDAR, IMU, 카메라 등 여러 센서의 데이터를 융합하려면 각 센서가 로봇의 어느 위치에 장착되어 있는지 정확히 알려줘야 합니다.
이 글에서는 Roboracer 플랫폼(SRX1 차량)에서 ROS의 TF(Transform) 시스템을 활용해 센서 좌표계를 설정하는 방법을 다룹니다.
TF(Transform)란?
ROS에서 TF는 서로 다른 좌표계(coordinate frame) 간의 변환 관계를 관리하는 시스템입니다.
예를 들어:
- 로봇의 중심(
base_link)에서 LiDAR까지 30cm 떨어져 있다 - IMU는 로봇 중심에서 왼쪽으로 6cm 이동한 곳에 있다
이런 공간적 관계를 정의하고 관리하는 게 TF의 역할입니다.
TF가 왜 필요한가?
센서마다 자기만의 좌표계로 데이터를 발행합니다:
- LiDAR는
laser프레임 기준으로 장애물 거리를 측정합니다. - IMU는
imu프레임 기준으로 가속도/각속도를 측정합니다. - 카메라는
camera_link프레임 기준으로 이미지를 촬영합니다.
이 데이터들을 융합하려면 공통 좌표계로 변환해야 하는데, 이때 TF가 각 센서의 위치/방향 정보를 제공합니다.
UNICORN SRX1의 TF 구조
Frame 계층 구조
1
2
3
4
5
6
7
8
9
10
11
12
map
└─ odom (또는 carto_odom)
└─ base_link ← 로봇의 중심 좌표계
├─ imu (Microstrain IMU)
│ └─ imu_rot (회전 보정)
├─ laser (Hokuyo LiDAR)
├─ vesc_imu (VESC 내장 IMU)
│ └─ vesc_imu_rot
└─ chassis (차체)
└─ zed_camera_link (ZED 카메라)
├─ camera_link (좌측 렌즈)
└─ zed_camera_right_link (우측 렌즈)
주요 Frame 설명
| Frame | 설명 | 부모 Frame |
|---|---|---|
| map | 전역 고정 좌표계 (SLAM 맵) | - |
| odom | Odometry 좌표계 (drift 있음) | map |
| base_link | 로봇 중심 (후륜축 중앙, 지면) | odom |
| imu | IMU 센서 위치 | base_link |
| laser | LiDAR 센서 위치 | base_link |
| vesc_imu | VESC 모터 컨트롤러 IMU | base_link |
| chassis | 차체 (base_link보다 5cm 위) | base_link |
| zed_camera_link | ZED 스테레오 카메라 | chassis |
좌표계 Convention (규칙)
로봇 공학에서는 여러 좌표계 규칙이 사용됩니다. UNICORN은 ROS 표준(REP-105)을 따릅니다.
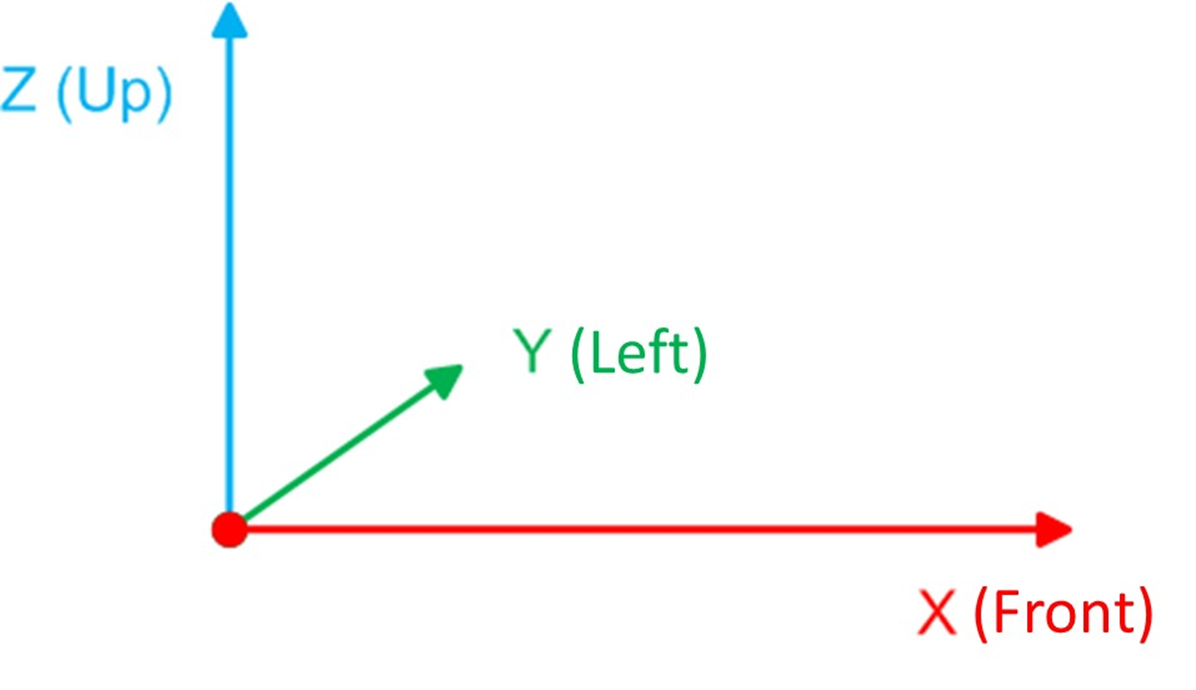
base_link: FLU (Forward-Left-Up)
- X축: 전방 (차량이 나아가는 방향)
- Y축: 좌측 (운전자 기준 왼쪽)
- Z축: 상방 (하늘 방향)
map/odom: ENU (East-North-Up)
- X축: 동쪽
- Y축: 북쪽
- Z축: 상방
왜 다른 규칙을 사용하나?
- base_link는 로봇 중심 좌표계이므로 로봇의 움직임 기준이 됩니다.
- map/odom은 세계 좌표계이므로 지도 기준으로 표현됩니다.
센서 데이터는 로봇 중심으로 처리하고, 최종 위치는 지도 좌표계로 표현하는 게 자연스럽기 때문입니다.
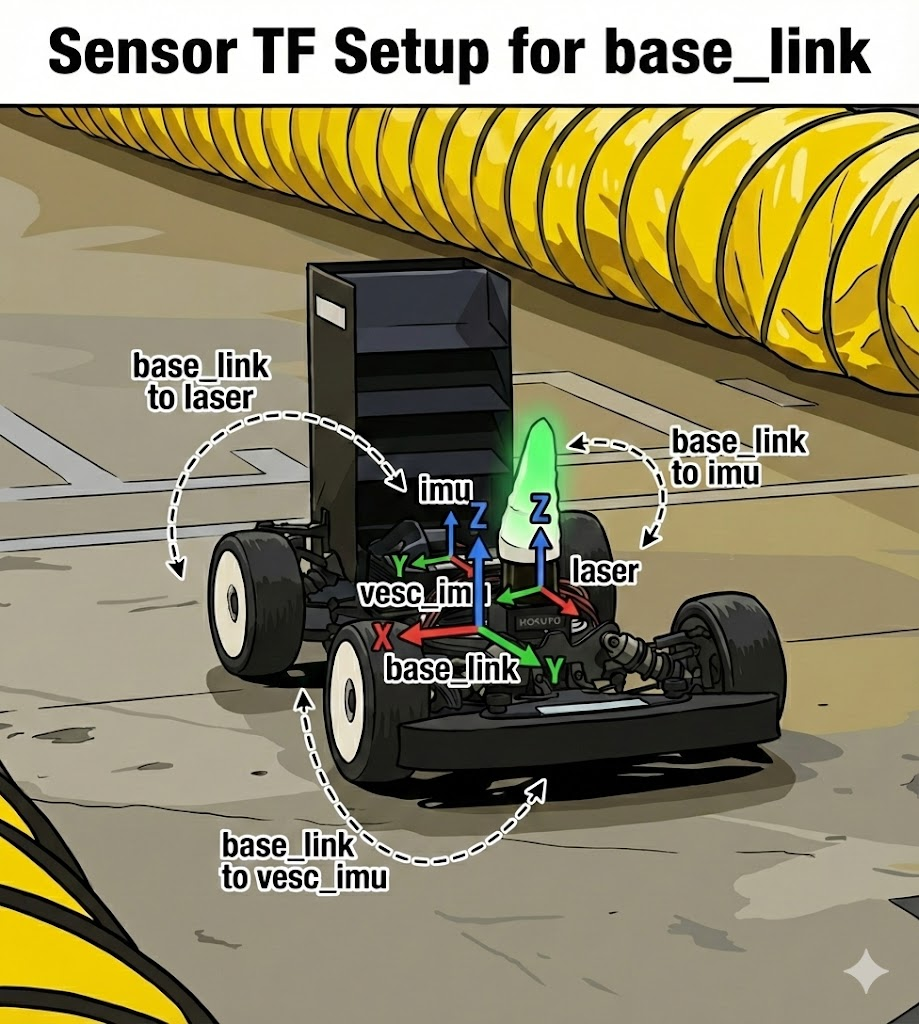
SRX1 센서 배치
실제 SRX1 차량의 센서들이 어디에 장착되어 있는지 살펴봅니다.
센서 위치 (base_link 기준)
| 센서 | X (m) | Y (m) | Z (m) | 설명 |
|---|---|---|---|---|
| IMU | 0.085 | 0.06 | 0.065 | 차량 전방, 좌측으로 치우침 |
| LiDAR | 0.270 | 0.0 | 0.127 | 차량 중앙선, 전방 |
| VESC IMU | 0.10 | 0.0 | 0.127 | VESC 모터 컨트롤러 내장 |
| ZED Camera | 0.390 | 0.0 | 0.09 | 가장 전방, 중앙 |
1
2
3
4
5
6
7
8
9
Front
↑
[LiDAR] (0.27, 0, 0.127)
|
[IMU] (0.085, 0.06, 0.065) ← 6cm 왼쪽
|
[VESC] (0.10, 0, 0.127)
|
base_link (0, 0, 0)
센서 배치 특징
SRX1의 Microstrain IMU는 차량 구조상 중앙에 장착하기 어려워 좌측으로 6cm 이동한 위치에 장착되어 있습니다. 이런 오프셋이 있어도 TF 시스템이 자동으로 보정해줍니다.
TF 설정 파일
SRX1의 센서 TF는 다음 파일에 정의되어 있습니다.
1
UNICORN/stack_master/config/SRX1/devices/static_transforms.launch.xml
파일 내용 살펴보기
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
<!-- -*- mode: XML -*- -->
<launch>
<!-- TFs -->
<arg name="pub_map_to_odom" default="False"/>
<!-- 1. IMU Transform -->
<node pkg="tf2_ros" type="static_transform_publisher" name="base_link_to_imu"
args="0.085 0.06 0.065 0.0 1.0 0.0 0.0 base_link imu" />
<node pkg="tf2_ros" type="static_transform_publisher" name="imu_to_imu_rot"
args="0.0 0.0 0.0 0.0 1.0 0.0 0.0 imu imu_rot" />
<!-- 2. LiDAR Transform -->
<node pkg="tf2_ros" type="static_transform_publisher" name="base_link_to_laser"
args="0.270 0.0 0.127 0.0 0.0 0.0 1.0 base_link laser" />
<!-- 3. VESC IMU Transform -->
<node pkg="tf2_ros" type="static_transform_publisher" name="base_link_to_vesc_imu"
args="0.10 0.0 0.127 0.0 0.0 -0.7071 0.7071 base_link vesc_imu" />
<node pkg="tf2_ros" type="static_transform_publisher" name="vesc_imu_to_vesc_imu_rot"
args="0.0 0.0 0.0 0.0 0.0 0.7071 0.7071 vesc_imu vesc_imu_rot" />
<!-- 4. Map to Odom (선택적) -->
<group if="$(arg pub_map_to_odom)">
<node pkg="tf" type="static_transform_publisher" name="map_to_odom"
args="0 0 0 0 0 0 map odom 10" />
</group>
</launch>
TF 파라미터 해석하기
static_transform_publisher의 args 형식
1
args="x y z qx qy qz qw parent_frame child_frame"
- x, y, z: 위치 (단위: 미터)
- qx, qy, qz, qw: 회전 (Quaternion 형식)
- parent_frame: 부모 좌표계
- child_frame: 자식 좌표계
예제 1: LiDAR Transform
1
args="0.270 0.0 0.127 0.0 0.0 0.0 1.0 base_link laser"
- 전방으로 27cm
- 좌우 중앙 (0)
- 위로 12.7cm
- 회전: (0, 0, 0, 1) = 회전 없음 (identity)
base_link에서laser로의 변환
LiDAR는 로봇 중심에서 전방 27cm, 높이 12.7cm에 있으며, base_link와 같은 방향을 보고 있다는 것을 의미합니다.
예제 2: IMU Transform
1
args="0.085 0.06 0.065 0.0 1.0 0.0 0.0 base_link imu"
- 전방 8.5cm
- 좌측 6cm
- 위로 6.5cm
- 회전: (0, 1, 0, 0) = 180도 pitch 회전
base_link에서imu로의 변환
IMU는 좌측으로 치우쳐 있고, 물리적으로 뒤집혀(180도 회전) 장착되어 있다는 것을 의미합니다.
1
2
3
4
Normal: Flipped (180° pitch):
↑ Z Z ↓
| |
o--→ X X ←--o
Quaternion 회전 이해하기
Quaternion이란?
3D 회전을 표현하는 방법 중 하나입니다. 4개의 숫자(qx, qy, qz, qw)로 회전을 나타냅니다.
자주 사용되는 회전
| 회전 | Quaternion (qx, qy, qz, qw) | 설명 |
|---|---|---|
| 회전 없음 | (0, 0, 0, 1) | Identity |
| Z축 90도 | (0, 0, 0.7071, 0.7071) | 좌회전 |
| Z축 -90도 | (0, 0, -0.7071, 0.7071) | 우회전 |
| Y축 180도 | (0, 1, 0, 0) | 뒤집힘 |
| X축 90도 | (0.7071, 0, 0, 0.7071) | 좌측 기울임 |
왜 IMU는 180도 회전하나?
IMU 센서가 물리적으로 거꾸로 장착되어 있기 때문입니다. 하지만 소프트웨어에서 TF로 보정해주면 데이터는 정상적으로 사용할 수 있습니다.
imu_rot은 왜 필요한가?
imu_rot는 Cartographer(SLAM 알고리즘)의 tracking_frame으로 사용됩니다. IMU를 한 번 더 180도 회전시켜 원래 방향으로 돌려놓는 역할입니다.
1
2
<node pkg="tf2_ros" type="static_transform_publisher" name="imu_to_imu_rot"
args="0.0 0.0 0.0 0.0 1.0 0.0 0.0 imu imu_rot" />
1
base_link --[180° pitch]--> imu --[180° pitch]--> imu_rot
결과적으로 imu_rot는 base_link와 같은 방향이 되지만, 중간에 imu frame을 거치게 됩니다.
VESC IMU의 회전
1
2
3
4
5
<!-- VESC IMU: Z축 -90도 회전 -->
args="0.10 0.0 0.127 0.0 0.0 -0.7071 0.7071 base_link vesc_imu"
<!-- VESC IMU Rotation: Z축 +90도 회전 -->
args="0.0 0.0 0.0 0.0 0.0 0.7071 0.7071 vesc_imu vesc_imu_rot"
왜 두 번 회전하나?
VESC 모터 컨트롤러에 내장된 IMU는 PCB 보드의 방향에 따라 Z축으로 90도 틀어져 있습니다.
vesc_imu: 물리적 마운트 방향 (-90도)vesc_imu_rot: 소프트웨어 보정 (+90도)
1
base_link: X→ Y↑ vesc_imu: X↑ Y← vesc_imu_rot: X→ Y↑
최종적으로 vesc_imu_rot는 base_link와 같은 방향이 됩니다.
TF 설정 로드 과정
Launch 파일 호출 순서
1
2
3
4
5
6
7
base_system.launch
└─ middle_level.launch
└─ low_level.launch ← 여기서 TF 로드!
├─ LiDAR 드라이버
├─ IMU 드라이버
├─ VESC 드라이버
└─ static_transforms.launch.xml ← TF 설정
low_level.launch 내용
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
<!-- UNICORN/stack_master/launch/low_level.launch -->
<launch>
<arg name="racecar_version" default="$(env CAR_NAME)" />
<!-- LiDAR -->
<node pkg="urg_node" type="urg_node" name="laser_node">
<rosparam file="$(find stack_master)/config/$(arg racecar_version)/devices/lidar.yaml" />
</node>
<!-- IMU -->
<node name="microstrain_inertial_driver" pkg="microstrain_inertial_driver"
type="microstrain_inertial_driver_node">
<rosparam file="$(find stack_master)/config/$(arg racecar_version)/devices/imu.yaml" />
</node>
<!-- VESC -->
<group ns="vesc">
<include file="$(find stack_master)/launch/vesc.launch">
<arg name="racecar_version" value="$(arg racecar_version)" />
</include>
</group>
<!-- ★ Static TF 로드 ★ -->
<include file="$(find stack_master)/config/$(arg racecar_version)/devices/static_transforms.launch.xml"/>
<!-- 기타 노드들 -->
<node pkg="stack_master" type="relay_node.py" name="relay_node" />
<node pkg="joy" type="joy_node" name="joy_node" />
</launch>
환경변수 CAR_NAME의 중요성
이 환경변수가 설정되어 있어야 올바른 차량의 TF 파일이 로드됩니다.
1
export CAR_NAME=SRX1
1
2
$(find stack_master)/config/$(arg racecar_version)/devices/static_transforms.launch.xml
→ UNICORN/stack_master/config/SRX1/devices/static_transforms.launch.xml
잘못된 CAR_NAME을 사용하면 다음 문제가 발생합니다.
- 다른 차량의 센서 위치 정보가 로드됩니다.
- 센서 융합이 부정확해집니다.
- SLAM 성능이 저하됩니다.
TF 확인하기
1. TF Tree 시각화
1
2
3
4
5
# ROS 실행 후
rosrun tf view_frames
# PDF 파일 생성됨
evince frames.pdf
출력 예시:
1
2
3
4
5
6
7
8
map
└─ odom
└─ base_link
├─ imu
│ └─ imu_rot
├─ laser
└─ vesc_imu
└─ vesc_imu_rot
2. 특정 Transform 확인
1
2
3
4
5
6
7
8
9
# LiDAR와 base_link 사이의 transform
rosrun tf tf_echo base_link laser
# 출력:
# At time 1234.567
# - Translation: [0.270, 0.000, 0.127]
# - Rotation: in Quaternion [0.000, 0.000, 0.000, 1.000]
# in RPY (radian) [0.000, 0.000, 0.000]
# in RPY (degree) [0.000, 0.000, 0.000]
1
2
3
4
5
6
7
# IMU와 base_link 사이의 transform
rosrun tf tf_echo base_link imu
# 출력:
# - Translation: [0.085, 0.060, 0.065]
# - Rotation: in Quaternion [0.000, 1.000, 0.000, 0.000]
# in RPY (degree) [0.000, 180.000, 0.000] ← 180도 pitch
3. Static TF 확인
1
rostopic echo /tf_static -n 20
모든 static transform이 발행되는지 확인할 수 있습니다.
4. RViz로 시각화
1
rosrun rviz rviz
RViz 설정:
- Fixed Frame을
base_link로 설정합니다. - Add → TF를 선택합니다.
- Show Names를 체크해 frame 이름을 표시합니다.
- Show Axes를 체크해 좌표축을 표시합니다.
- Show Arrows를 체크해 부모-자식 관계 화살표를 표시합니다.
보이는 것:
- 빨간 화살표: X축 (전방)
- 초록 화살표: Y축 (좌측)
- 파란 화살표: Z축 (위)
각 센서의 위치와 방향을 직관적으로 확인할 수 있습니다.
센서 TF 수정하기
언제 TF를 수정하나?
- 센서 위치 변경: 물리적으로 센서를 다른 곳에 장착
- 센서 추가: 새로운 센서 장착
- 캘리브레이션: 더 정확한 위치 측정 후 업데이트
수정 절차
1. 물리적 위치 측정
센서의 정확한 위치를 측정합니다.
측정 팁:
- 줄자로 cm 단위까지 측정합니다.
- X축은 차량 전방(보통 +값)입니다.
- Y축은 좌측이 +, 우측이 -입니다.
- Z축은 지면에서 센서까지의 높이입니다.
1
2
3
4
5
6
7
기준점: base_link (후륜축 중앙, 지면)
측정 항목:
- X: 전방 거리 (m)
- Y: 좌우 거리 (m, 좌측이 +)
- Z: 높이 (m)
- 회전: roll, pitch, yaw (도 또는 라디안)
2. Quaternion 계산
Roll, Pitch, Yaw를 Quaternion으로 변환합니다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
#!/usr/bin/env python3
from tf.transformations import quaternion_from_euler
import math
# 각도를 라디안으로 변환
roll = math.radians(0) # X축 회전
pitch = math.radians(180) # Y축 회전 (예: 뒤집힌 IMU)
yaw = math.radians(0) # Z축 회전
# Quaternion 계산
quat = quaternion_from_euler(roll, pitch, yaw)
print(f"Quaternion:")
print(f" qx = {quat[0]:.4f}")
print(f" qy = {quat[1]:.4f}")
print(f" qz = {quat[2]:.4f}")
print(f" qw = {quat[3]:.4f}")
# 출력 예시:
# Quaternion:
# qx = 0.0000
# qy = 1.0000
# qz = 0.0000
# qw = 0.0000
3. launch 파일 수정
1
2
cd ~/unicorn_ws/UNICORN/stack_master/config/SRX1/devices
code static_transforms.launch.xml
예시: LiDAR 위치를 30cm 전방으로 변경
변경 전:
1
2
<node pkg="tf2_ros" type="static_transform_publisher" name="base_link_to_laser"
args="0.270 0.0 0.127 0.0 0.0 0.0 1.0 base_link laser" />
변경 후:
1
2
<node pkg="tf2_ros" type="static_transform_publisher" name="base_link_to_laser"
args="0.300 0.0 0.127 0.0 0.0 0.0 1.0 base_link laser" />
4. 재실행 및 확인
1
2
3
4
5
# ROS 재시작
roslaunch stack_master base_system.launch map:=YOUR_MAP
# 새 터미널에서 확인
rosrun tf tf_echo base_link laser
센서 추가하기
새로운 센서(예: Realsense 카메라)를 추가한다고 가정해봅시다.
1. 센서 위치 결정
- 위치: (0.35, 0.0, 0.10) - 전방 35cm, 중앙, 높이 10cm
- 회전: 15도 아래를 향함 (pitch = -15도)
2. Quaternion 계산
1
2
3
4
5
6
7
from tf.transformations import quaternion_from_euler
import math
pitch = math.radians(-15) # 15도 아래
quat = quaternion_from_euler(0, pitch, 0)
# 결과: (0.0, -0.1305, 0.0, 0.9914)
3. static_transforms.launch.xml에 추가
1
2
3
<!-- RealSense Camera -->
<node pkg="tf2_ros" type="static_transform_publisher" name="base_link_to_realsense"
args="0.35 0.0 0.10 0.0 -0.1305 0.0 0.9914 base_link realsense_link" />
IMU 설정 파일 (imu.yaml)
TF뿐만 아니라 IMU 센서 자체의 설정도 중요합니다.
주요 설정 항목
1
2
3
4
5
6
7
8
9
10
11
12
13
14
# SRX1/devices/imu.yaml
# Frame 설정
frame_id: 'imu'
mount_frame_id: "base_link"
use_enu_frame: True # ← 중요!
# IMU가 base_link 대비 어떻게 마운트되어 있는지
publish_mount_to_frame_id_transform: False
# TF는 static_transforms.launch.xml에서 관리하므로 False
# IMU 데이터 발행 주기
imu_data_rate: 100 # 100Hz
filter_imu_data_rate: 250 # 250Hz (EKF 필터링된 데이터)
use_enu_frame의 의미
False (NED - North, East, Down):
- 항공/해양 표준
- Z축이 아래를 향함 (Down)
True (ENU - East, North, Up):
- ROS 표준
- Z축이 위를 향함 (Up)
SRX1은 use_enu_frame: True로 설정되어 ROS 표준을 따릅니다.
Cartographer와 TF
mapping.lua 설정
1
2
3
4
5
6
7
8
9
10
11
12
13
14
-- SRX1/SE/slam/mapping.lua
options = {
map_frame = "map",
tracking_frame = "imu_rot", -- ← Cartographer가 추적할 frame
published_frame = "base_link", -- ← 결과를 발행할 frame
odom_frame = "carto_odom",
provide_odom_frame = true,
publish_frame_projected_to_2d = true,
num_laser_scans = 1,
use_odometry = false,
}
tracking_frame = “imu_rot”의 의미
Cartographer는 imu_rot frame의 자세(orientation)를 추적합니다.
왜 base_link가 아니라 imu_rot인가?
- IMU는 고주파 자세 데이터를 제공합니다 (100-250Hz).
base_link는 센서 없음(가상의 좌표계)입니다.- IMU를 tracking하면 부드럽고 정확한 자세 추정을 할 수 있습니다.
published_frame = "base_link"의 의미:
- 하지만 최종 결과는
base_link로 발행됩니다. - TF를 통해 자동 변환됩니다:
imu_rot→imu→base_link
문제 해결 (Troubleshooting)
문제 1: TF가 발행되지 않음
증상:
1
2
rosrun tf tf_echo base_link laser
# Exception thrown: Frame laser does not exist
원인:
static_transforms.launch.xml이 로드되지 않음CAR_NAME환경변수가 잘못됨- launch 파일 문법 오류
해결:
1
2
3
4
5
6
7
8
9
10
11
12
13
# 1. CAR_NAME 확인
echo $CAR_NAME
# 출력: SRX1 (정상) 또는 비어있음 (비정상)
# 2. static_transform_publisher 노드 확인
rosnode list | grep static_transform_publisher
# 출력: /base_link_to_imu, /base_link_to_laser 등
# 3. launch 파일 문법 체크
roslaunch --check stack_master low_level.launch
# 4. 수동으로 TF 발행 테스트
rosrun tf2_ros static_transform_publisher 0.27 0 0.127 0 0 0 1 base_link laser
문제 2: TF가 계속 변함 (Static이 아님)
증상:
1
2
rostopic hz /tf
# rate average: 100.0 ← Static TF는 발행 빈도가 낮아야 함
원인:
/tf토픽을 사용함 (Dynamic TF용)/tf_static토픽을 써야 함
해결:
1
2
3
# /tf_static 확인
rostopic hz /tf_static
# rate average: 0.1 ← 정상 (10초에 1번 정도)
문제 3: Cartographer가 IMU를 못 찾음
증상:
1
2
3
[ERROR] [cartographer]: Failed to compute relative pose.
Lookup would require extrapolation at time 1234.567,
but only time 1234.560 is in the buffer.
원인:
imu_rotframe이 없음- IMU 데이터의
frame_id가 잘못됨
해결:
1
2
3
4
5
6
7
8
9
10
# 1. imu_rot frame 확인
rosrun tf tf_echo base_link imu_rot
# 2. IMU 데이터의 frame_id 확인
rostopic echo /imu/data -n 1 | grep frame_id
# 출력: frame_id: "imu" ← "imu"여야 함
# 3. imu.yaml의 frame_id 확인
cat ~/unicorn_ws/UNICORN/stack_master/config/SRX1/devices/imu.yaml | grep frame_id
# 출력: frame_id : 'imu'
문제 4: 센서 데이터가 이상한 위치에 표시됨
증상:
- RViz에서 LiDAR 스캔이 차량 뒤에 표시됨
- IMU 방향이 반대
원인:
- TF의 위치/회전 값이 잘못됨
- Quaternion 부호 오류
해결:
1
2
3
4
5
6
7
8
9
# 1. TF 값 확인
rosrun tf tf_echo base_link laser
# 2. 예상 값과 비교
# X가 음수면? → 센서가 뒤쪽에 있다고 인식
# Quaternion의 부호가 반대면? → 180도 틀어짐
# 3. static_transforms.launch.xml 수정
# X 값을 음수에서 양수로, 또는 quaternion 부호 변경
마치며
정확한 TF가 없으면 다음 문제가 발생합니다.
- SLAM이 제대로 동작하지 않습니다.
- 센서 융합이 불가능합니다.
- 경로 계획 오류가 발생합니다.
하지만 한 번 설정해두면 모든 센서 데이터가 자동으로 정렬됩니다.
요약
- base_link가 중심입니다: 모든 센서는 base_link 기준으로 정의합니다.
- Static TF가 필요합니다: 센서 위치는 변하지 않으므로 static_transform_publisher를 사용합니다.
- FLU Convention을 따릅니다: ROS 표준(Forward-Left-Up)입니다.
- Quaternion으로 회전을 표현합니다.
tf_echo,view_frames, RViz로 반드시 확인합니다.
Reference
SRX1 전체 TF 설정
static_transforms.launch.xml
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
<!-- -*- mode: XML -*- -->
<launch>
<!-- TFs -->
<arg name="pub_map_to_odom" default="False"/>
<!-- IMU (Microstrain) -->
<node pkg="tf2_ros" type="static_transform_publisher" name="base_link_to_imu"
args="0.085 0.06 0.065 0.0 1.0 0.0 0.0 base_link imu" />
<node pkg="tf2_ros" type="static_transform_publisher" name="imu_to_imu_rot"
args="0.0 0.0 0.0 0.0 1.0 0.0 0.0 imu imu_rot" />
<!-- LiDAR (Hokuyo) -->
<node pkg="tf2_ros" type="static_transform_publisher" name="base_link_to_laser"
args="0.270 0.0 0.127 0.0 0.0 0.0 1.0 base_link laser" />
<!-- VESC IMU (내장) -->
<node pkg="tf2_ros" type="static_transform_publisher" name="base_link_to_vesc_imu"
args="0.10 0.0 0.127 0.0 0.0 -0.7071 0.7071 base_link vesc_imu" />
<node pkg="tf2_ros" type="static_transform_publisher" name="vesc_imu_to_vesc_imu_rot"
args="0.0 0.0 0.0 0.0 0.0 0.7071 0.7071 vesc_imu vesc_imu_rot" />
<!-- Map to Odom (옵션) -->
<group if="$(arg pub_map_to_odom)">
<node pkg="tf" type="static_transform_publisher" name="map_to_odom"
args="0 0 0 0 0 0 map odom 10" />
</group>
</launch>
센서 위치 요약 (SRX1)
| Frame | Parent | X | Y | Z | Rotation (deg) |
|---|---|---|---|---|---|
| imu | base_link | 0.085 | 0.06 | 0.065 | pitch=180 |
| imu_rot | imu | 0 | 0 | 0 | pitch=180 |
| laser | base_link | 0.270 | 0 | 0.127 | none |
| vesc_imu | base_link | 0.10 | 0 | 0.127 | yaw=-90 |
| vesc_imu_rot | vesc_imu | 0 | 0 | 0 | yaw=+90 |
| chassis | base_link | 0 | 0 | 0.05 | none |
| zed_camera_link | chassis | 0.390 | 0 | 0.04 | none |