VESC 내장 IMU 설정 및 ROS 연동 가이드

VESC 내장 IMU 설정 및 ROS 연동 가이드
VESC에는 자체 내장 IMU가 탑재되어 있어, 별도의 IMU 센서 없이도 차량의 자세 정보를 얻을 수 있습니다. 다만, 이 기능을 사용하려면 펌웨어 업그레이드가 필요합니다. 이 글에서는 VESC 내장 IMU 설정 방법과 ROS 연동 시 활용 방법을 정리했습니다.
IMU 설정 방법
펌웨어를 업그레이드하면 VESC 자체에 내장된 IMU를 사용할 수 있습니다. App Settings → General → IMU 탭에서 센서 설정을 수정할 수 있습니다.
실시간 IMU 데이터 확인
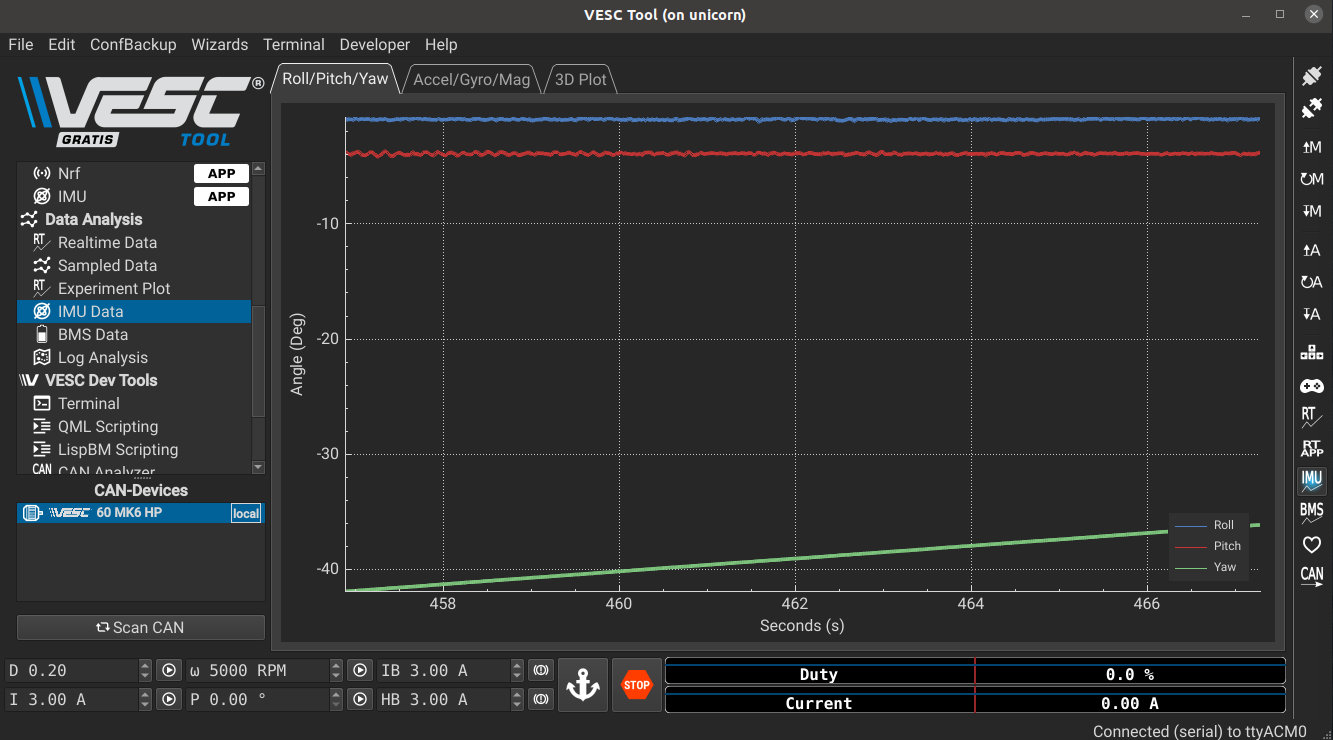
- 우측 메뉴바의 Activate IMU Sampling을 활성화하면 실시간으로 IMU 값을 GUI로 확인할 수 있습니다.
- Data Analysis → IMU Data에서 실시간 샘플링된 IMU 데이터를 자세히 확인할 수 있습니다.
ROS 연동
ROS에서 VESC를 사용할 때는 vesc/sensors/imu/raw 토픽으로 VESC 내장 IMU 데이터를 확인할 수 있습니다. 출력 값을 통해 IMU 축을 확인한 뒤 사용하는 것을 권장합니다. 또한 base_link 기준으로 다른 센서와의 static TF를 맞추는 것도 중요합니다.
마무리
VESC 내장 IMU를 사용하면 별도의 IMU 모듈 없이도 차량 자세 정보를 획득할 수 있어 시스템 구성을 단순화할 수 있습니다. 다만, 외장 IMU에 비해 정밀도가 떨어질 수 있으므로 고정밀 자세 추정이 필요한 경우에는 외장 IMU를 별도로 사용하는 것을 권장합니다.
This post is licensed under CC BY 4.0 by the author.