샤시 및 상판 부품 체결 가이드
필요 물품 준비
아래는 비어 있는 SRX8 샤시입니다.
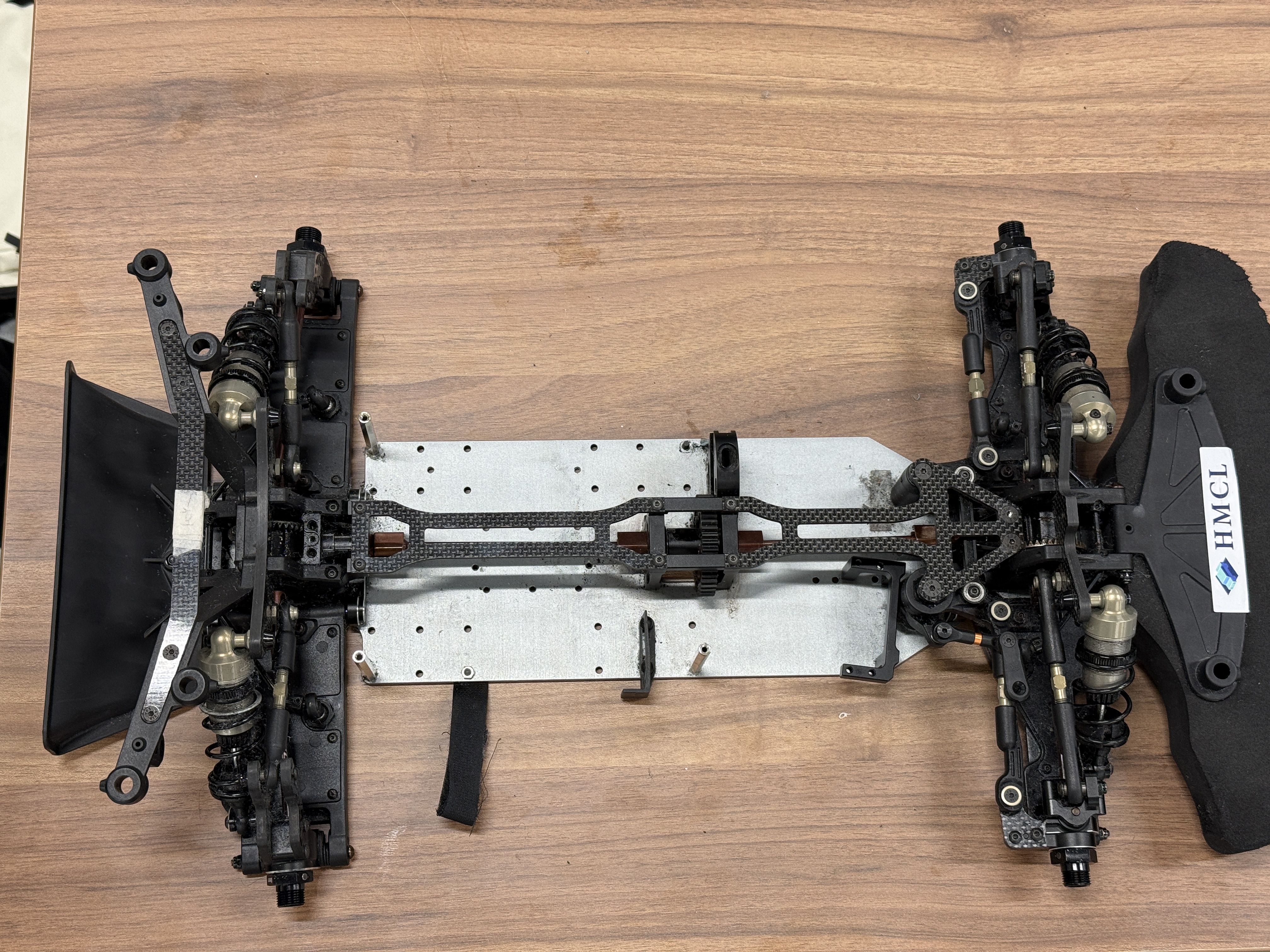 빈 SRX8 샤시 상태
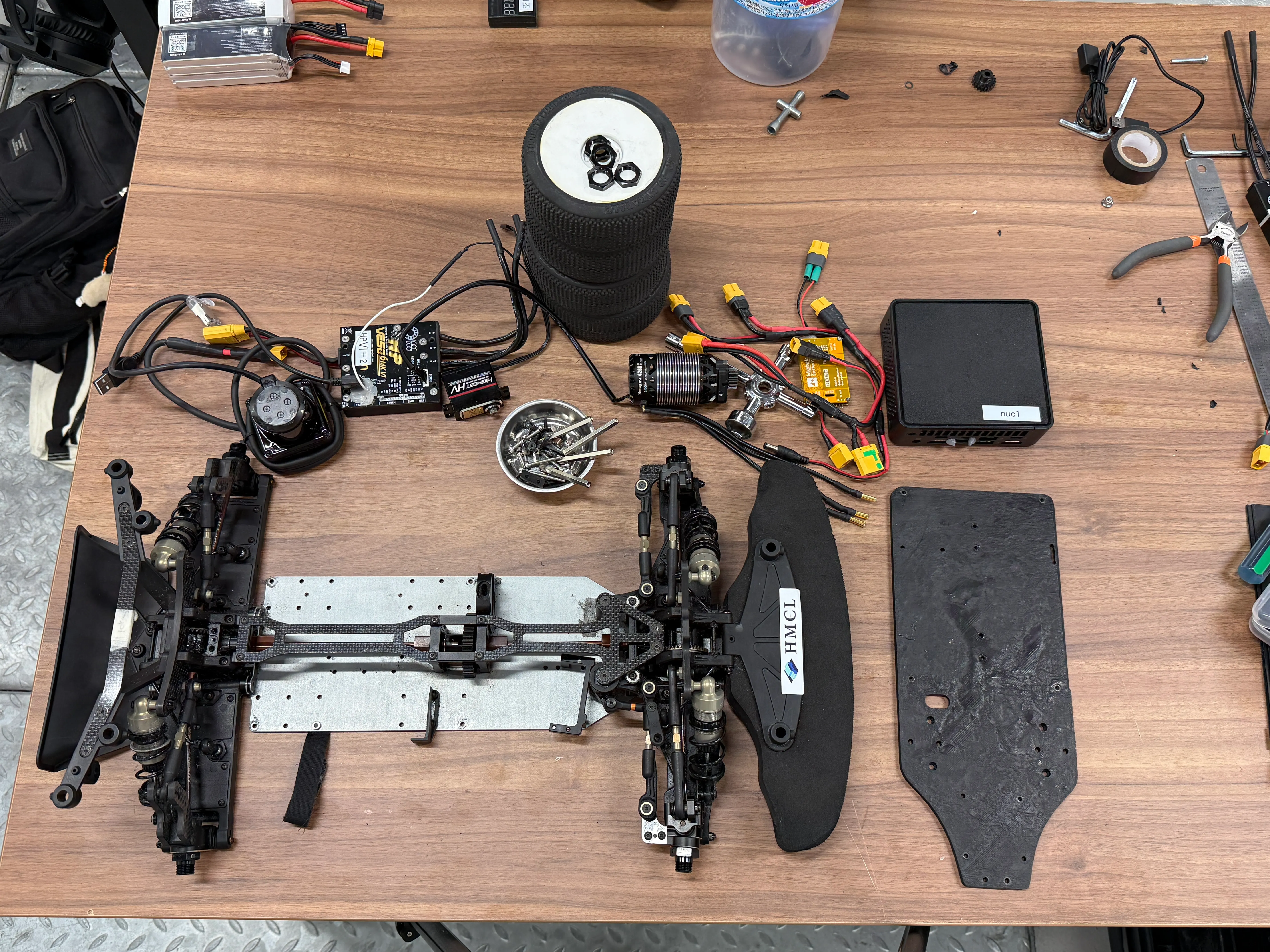
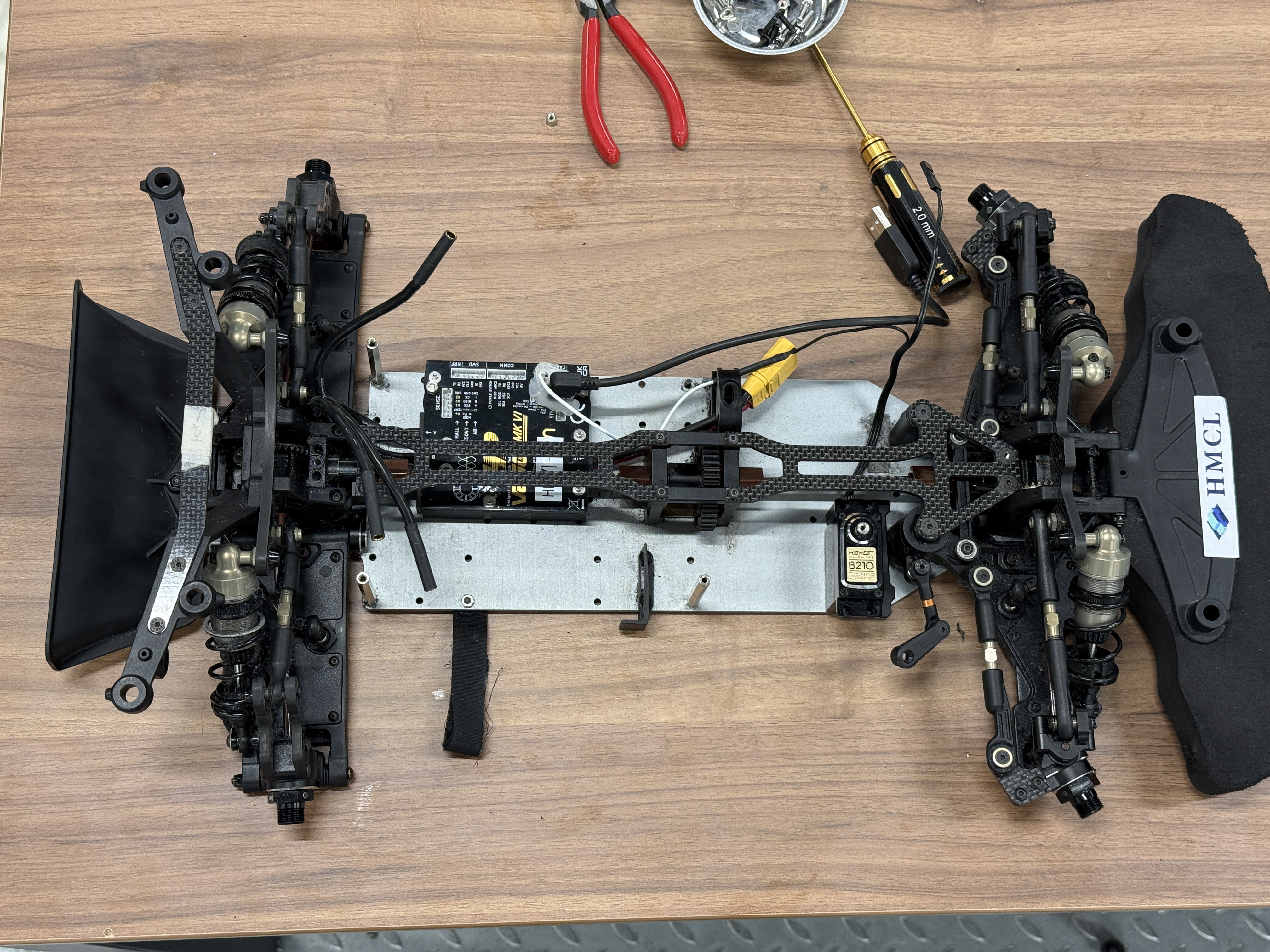
빈 SRX8 샤시 상태한 대에 필요한 전체 부품입니다.
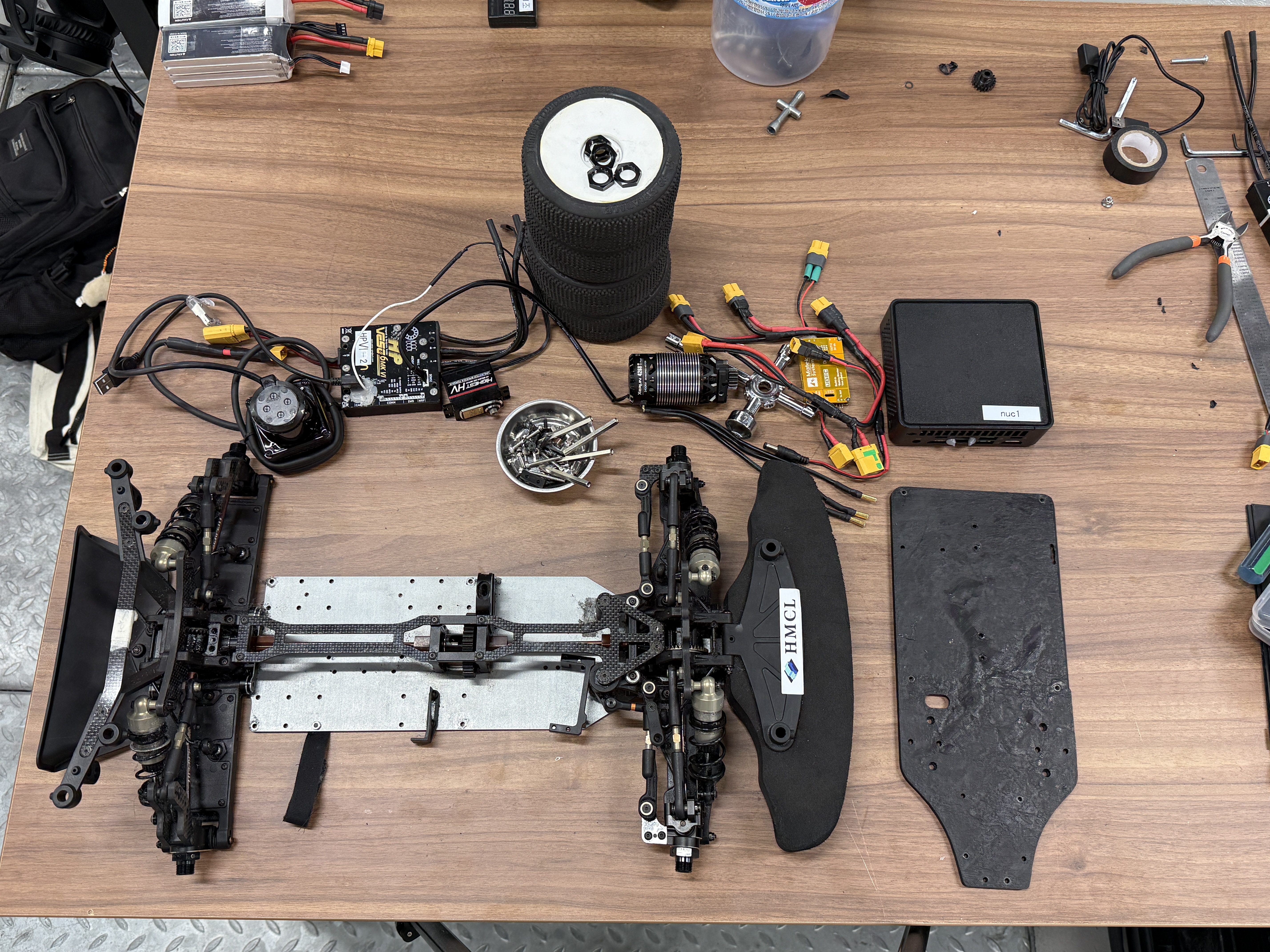 사용될 전체 부품 모음
사용될 전체 부품 모음전원 하네스는 모두 XT-60 규격으로 통일했습니다.
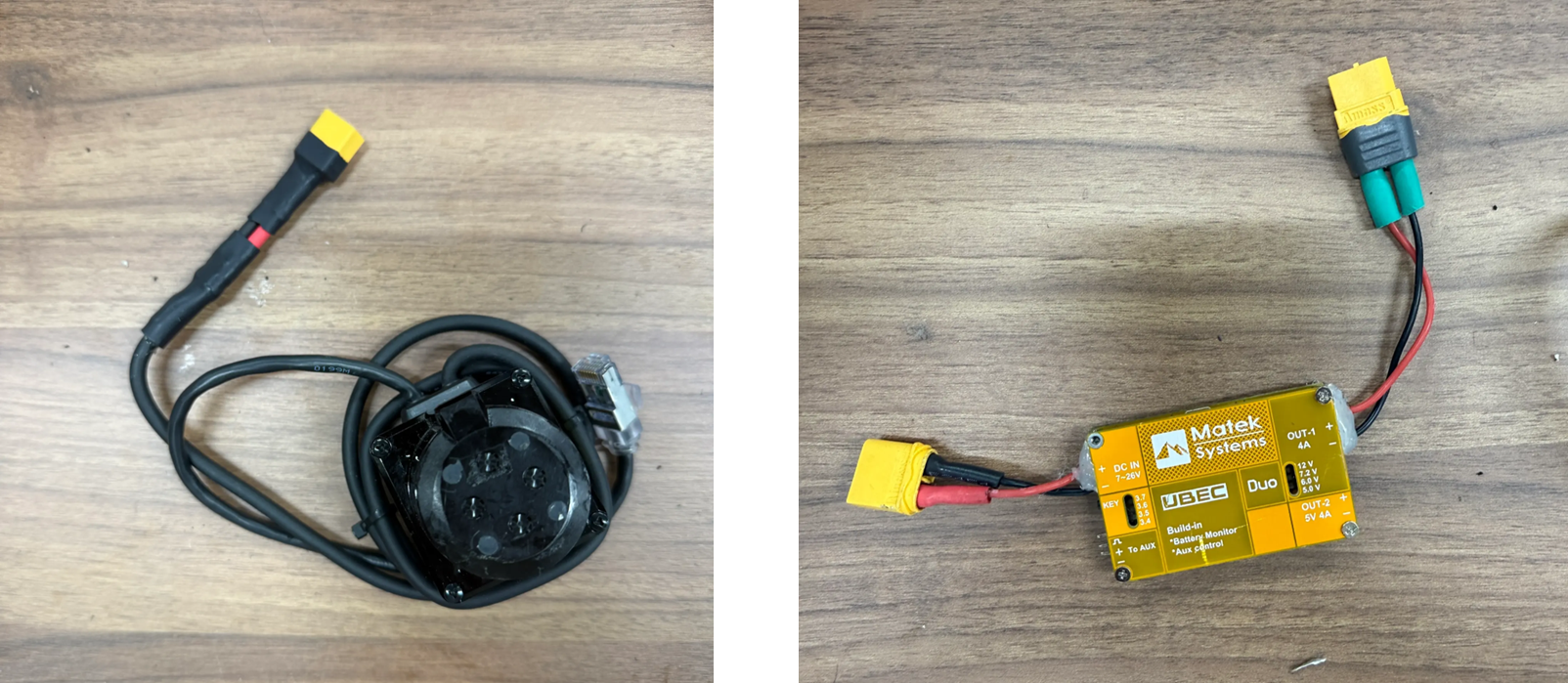
LiDAR와 BEC 입력·출력을 XT-60으로 변환
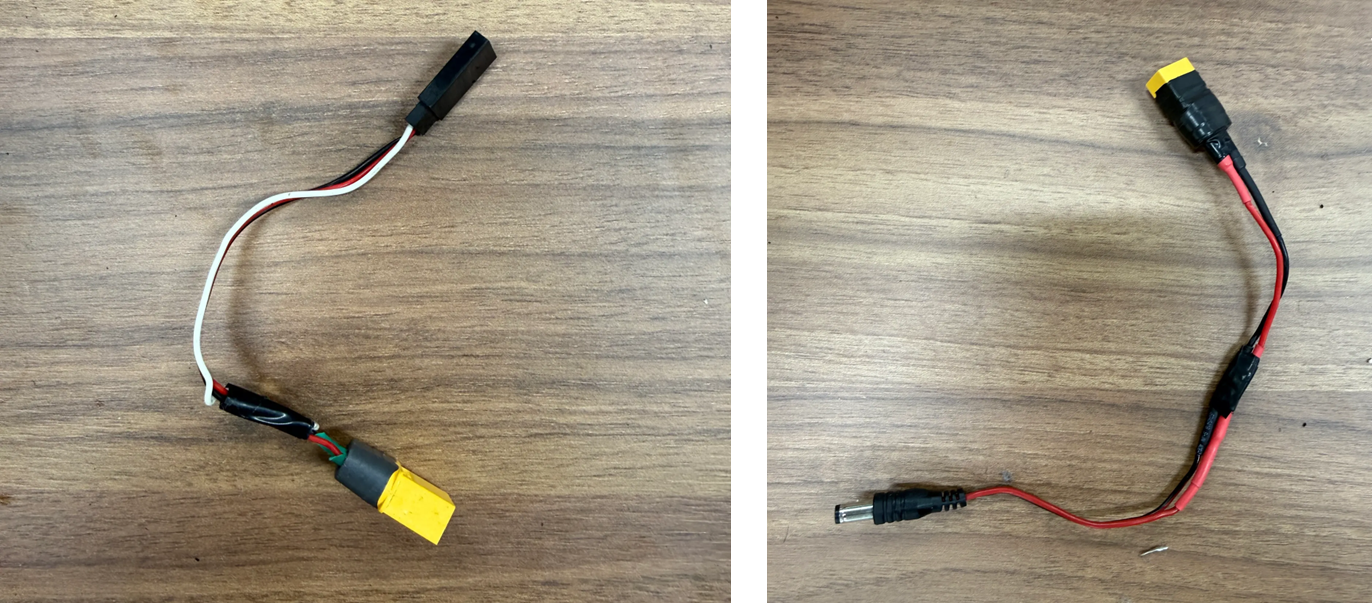
Servo 3핀, NUC 배럴 잭을 XT-60으로 변환배선도는 이해용 참고 자료이므로 지금은 조립하지 않습니다.
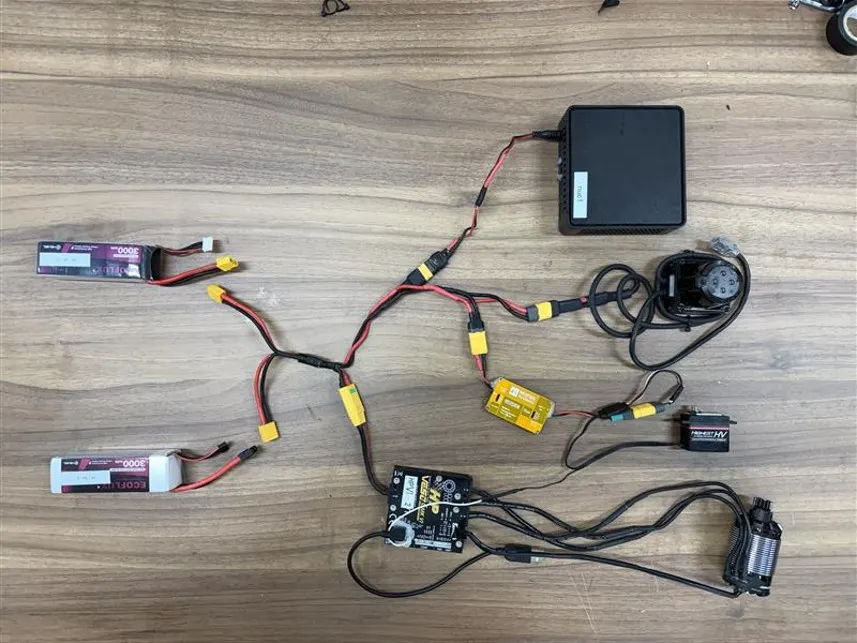 전체 배선 흐름도
전체 배선 흐름도
하판 부품 조립
섀시에 VESC 장착
알루미늄 하판에 VESC 고정용 추가 홀을 가공했습니다. 이 홀을 기준으로 VESC를 위치시켰습니다.
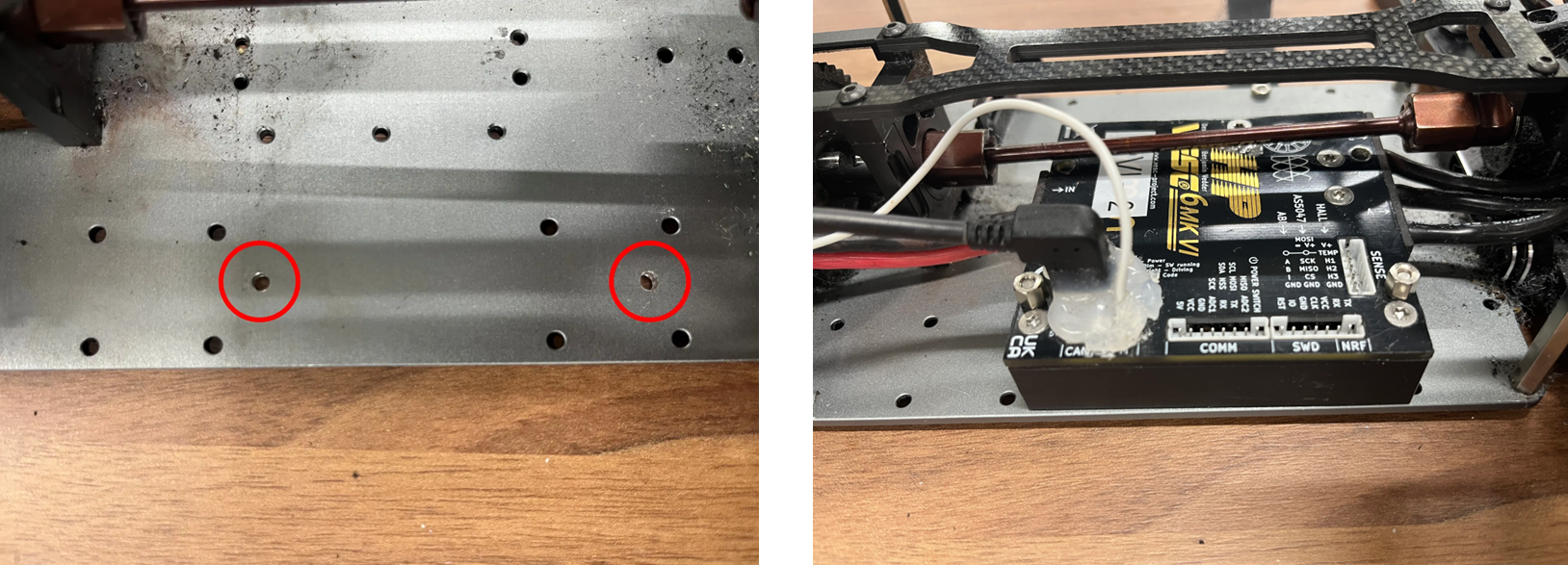 VESC 고정 홀 가공 위치
VESC 고정 홀 가공 위치
볼트·너트를 과도하게 조이면 상판이 찌그러질 수 있어, 와셔를 넣어 변형을 최소화했습니다.
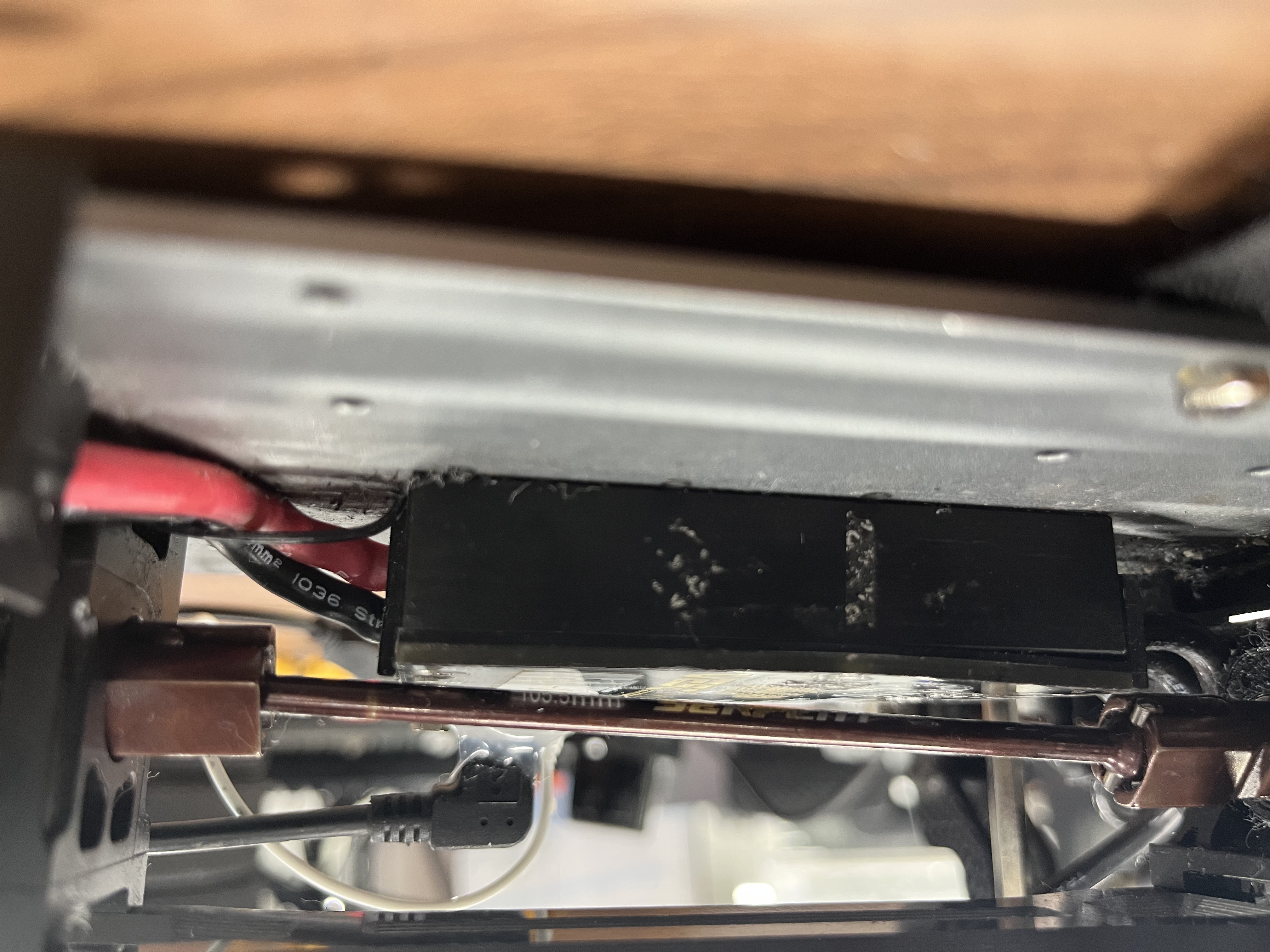 와셔를 사용한 VESC 체결
와셔를 사용한 VESC 체결
샤프트 구동 범위와 VESC가 간섭하지 않는지 장착 후 반드시 확인했습니다.
섀시에 배터리 고정 끈 장착
기존 하판 홀을 활용해 벨크로 스트랩을 고정했습니다. 추후 배터리를 안정적으로 묶을 수 있습니다.
 벨크로 스트랩 고정
벨크로 스트랩 고정
섀시에 서보모터 장착
서보 높이로 생기는 유격을 없애는 서포트를 먼저 끼우고, 서보 케이블이 안쪽으로 향하도록 장착했습니다.

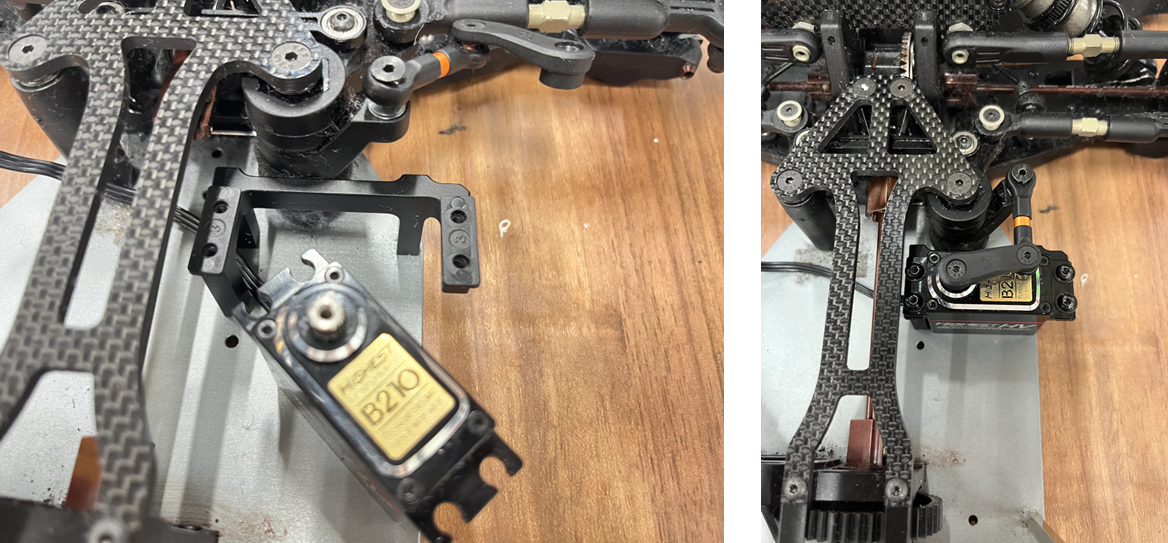 서보 서포트 및 장착 예시
서보 서포트 및 장착 예시
서보 중앙 정렬을 끝낸 뒤 서보 암을 결합했습니다. 자세한 절차는 /unicorn-racing/posts/servo-horn-after-alignment/를 참고했습니다.
모터 장착
DC 모터는 피니언 기어와 구동축 기어 간격을 맞춘 뒤 체결했습니다.
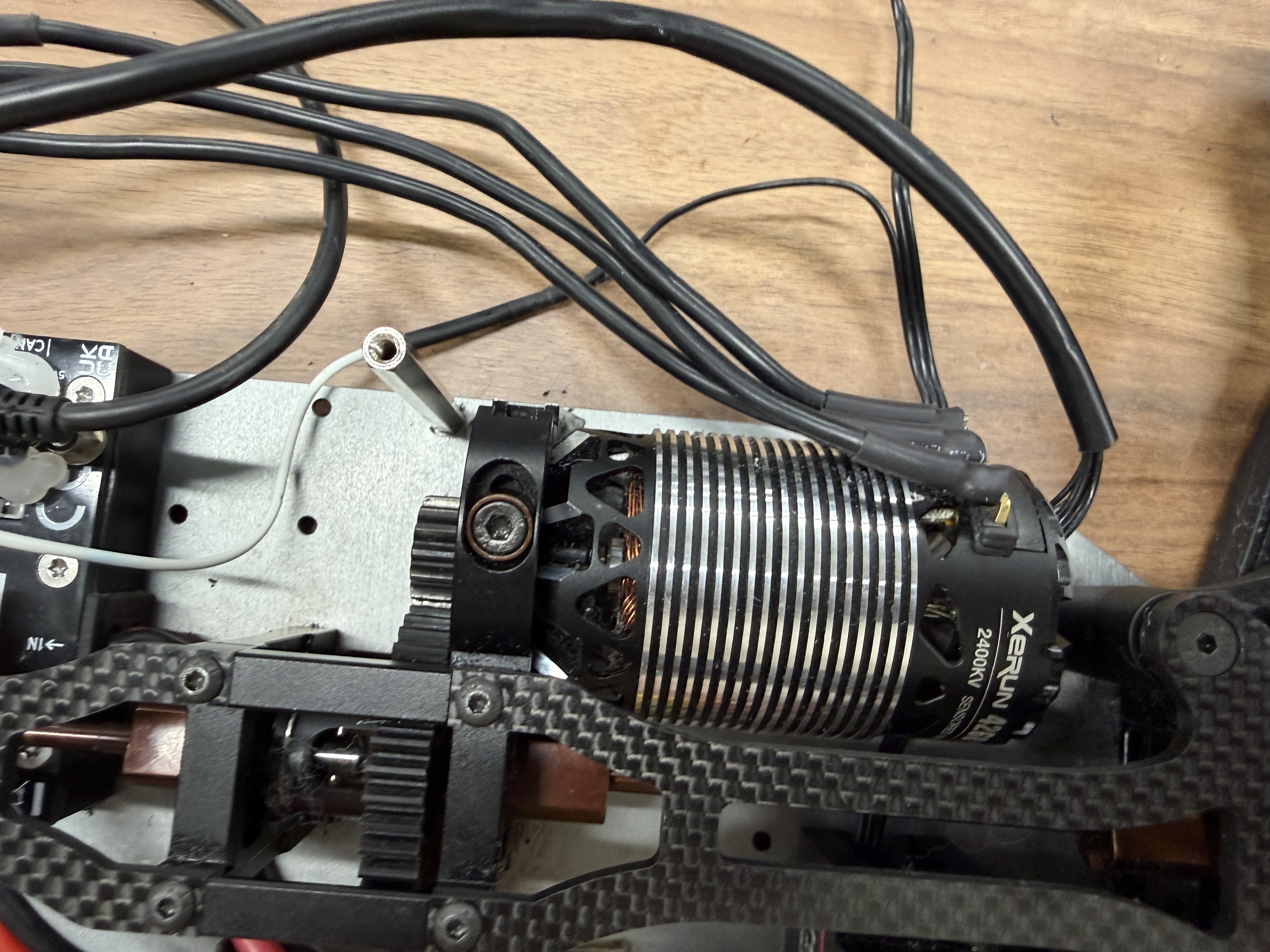 피니언-구동축 기어 간격 설정
피니언-구동축 기어 간격 설정
간격 조절 방법은 /unicorn-racing/posts/motor-pinion-gear-gap-adjustment/를 참고했습니다.
지지대 너트 체결
하판 조립이 끝나면 상판을 올리기 위한 지지대 너트를 체결합니다.
 지지대 너트 체결 상태
지지대 너트 체결 상태
상판 부품 조립
IMU 장착
상판 아랫면에 IMU를 먼저 부착했습니다.
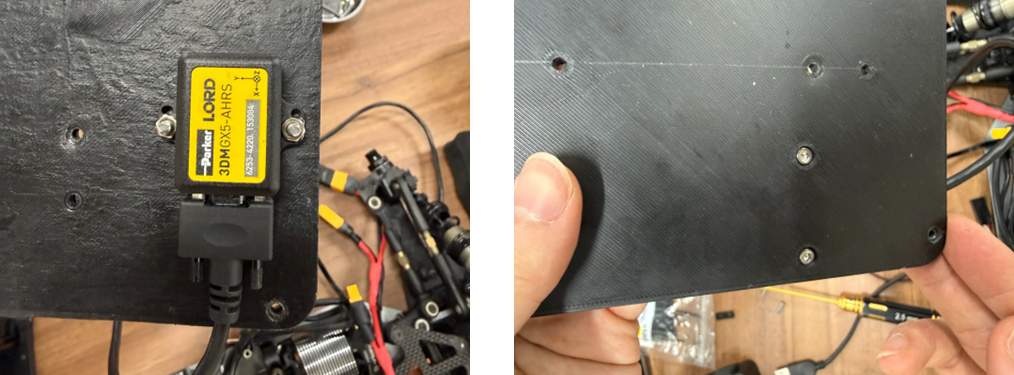 IMU 부착 위치
IMU 부착 위치
NUC 장착
상판의 두 개 고정 홀에 맞춰 NUC를 체결했습니다. 하판이 들뜨지 않도록 너트와 와셔를 조합해 간격을 확보했습니다.
 NUC 고정 및 스페이서 활용
NUC 고정 및 스페이서 활용
Lidar 장착
마지막으로 LiDAR를 상판에 고정했습니다.
 상판 LiDAR 장착
상판 LiDAR 장착
마무리
샤시와 상판에 부품을 체결할 때는 전원 하네스 규격 통일, 기계적 간섭, 체결 강도를 모두 고려해야 합니다. VESC 주변은 변형을 막기 위해 와셔를 사용했고, 서보·모터는 정렬과 간격을 먼저 맞춘 뒤 조립했습니다. 지지대와 상판 장착을 마쳤다면 배선 정리까지 완료해 주행 중 흔들림이나 단선을 예방하시기 바랍니다.