VESC PID Controllers 튜닝 가이드

VESC PID Controllers 튜닝 가이드
FOC 세팅으로 모터 제어 준비가 끝났다면, 이제 제어 정밀도를 높일 차례입니다. VESC Tool은 모터 전류를 정밀하게 제어하기 위한 PID 튜닝 도구를 제공하며, 이를 통해 모터 반응을 원하는 방향으로 조정할 수 있습니다. 이 글에서는 PID 게인 튜닝 방법과 주의사항을 정리했습니다.
PID 튜닝이 필요한 경우
Sensorless 모터를 사용하는 경우에는 PID 튜닝을 진행하는 것을 추천합니다. Sensored 모터는 기본 설정에서도 큰 차이가 나지 않을 수 있습니다.
튜닝 환경 설정
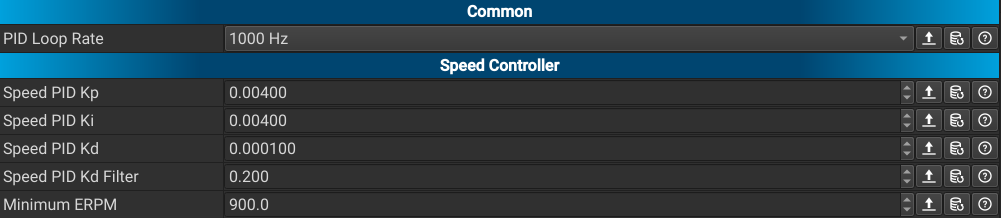
- 아래 인터페이스에서 PID 게인을 튜닝할 수 있습니다.
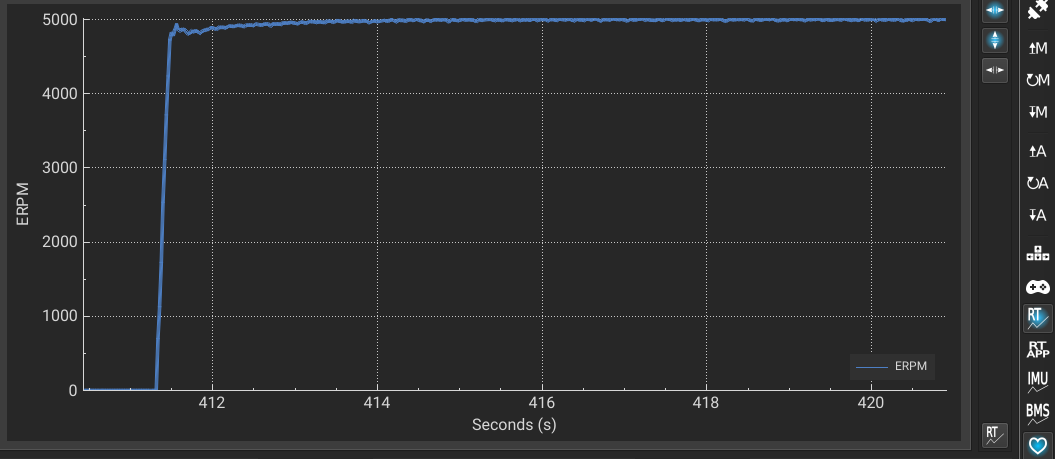
- 왼쪽 탭의 Data Analysis → Realtime Data → RPM에서 변화를 관측합니다.
- 실시간 변화를 보기 위해 우측 메뉴바의 Stream realtime data를 활성화해야 합니다.
모터 구동 방법
하단 RPM 옆의 재생 버튼으로 모터를 구동할 수 있고, 오른쪽의 STOP 버튼으로 정지할 수 있습니다.

PID 게인 튜닝 방법
PID 게인은 P와 D 위주로 튜닝하는 것을 추천합니다.
- P를 점진적으로 높여, 다양한 RPM 범위에서 반응 속도와 오버슈트를 관측합니다. 오버슈트가 심하지 않을 수준으로 조정합니다.
- D를 점진적으로 키워 큰 진동을 줄이는 방향으로 튜닝합니다.
- D가 너무 크면 잔진동에도 민감해질 수 있으므로 조금씩 키우는 것을 권장합니다.
주의사항
전류를 다루는 작업이기 때문에 항상 조심해야 합니다. 값을 급격하게 변화시키는 것은 지양해야 합니다.
마무리
PID 튜닝은 모터 제어 품질을 결정짓는 중요한 과정입니다. 튜닝이 잘 되어 있으면 차량이 명령에 빠르고 안정적으로 반응하지만, 튜닝이 부족하면 반응이 느리거나 진동이 발생할 수 있습니다. 시간을 들여 다양한 RPM 범위에서 테스트하며 최적의 게인 값을 찾는 것을 권장합니다.
This post is licensed under CC BY 4.0 by the author.