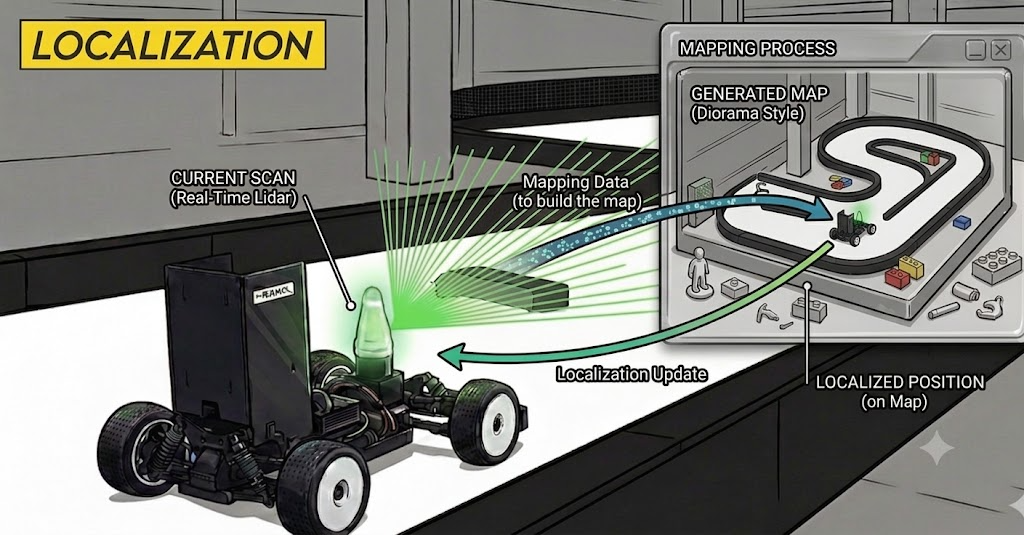
Localization - Cartographer: Particle Filter와의 비교
이제 Cartographer를 localization에 사용하는 방법을 알아보겠습니다. Cartographer Pure Localization의 개념·설정·UNICORN 수정 사항은 Cartographer를 활용한 Pure Localization 가이드에 정리되어 있으니, 이 글에서는 직관적인 동작 방식과 Particle Filter와의 비교에 집중합...