Gaussian Process를 활용한 상대 차량 궤적 예측
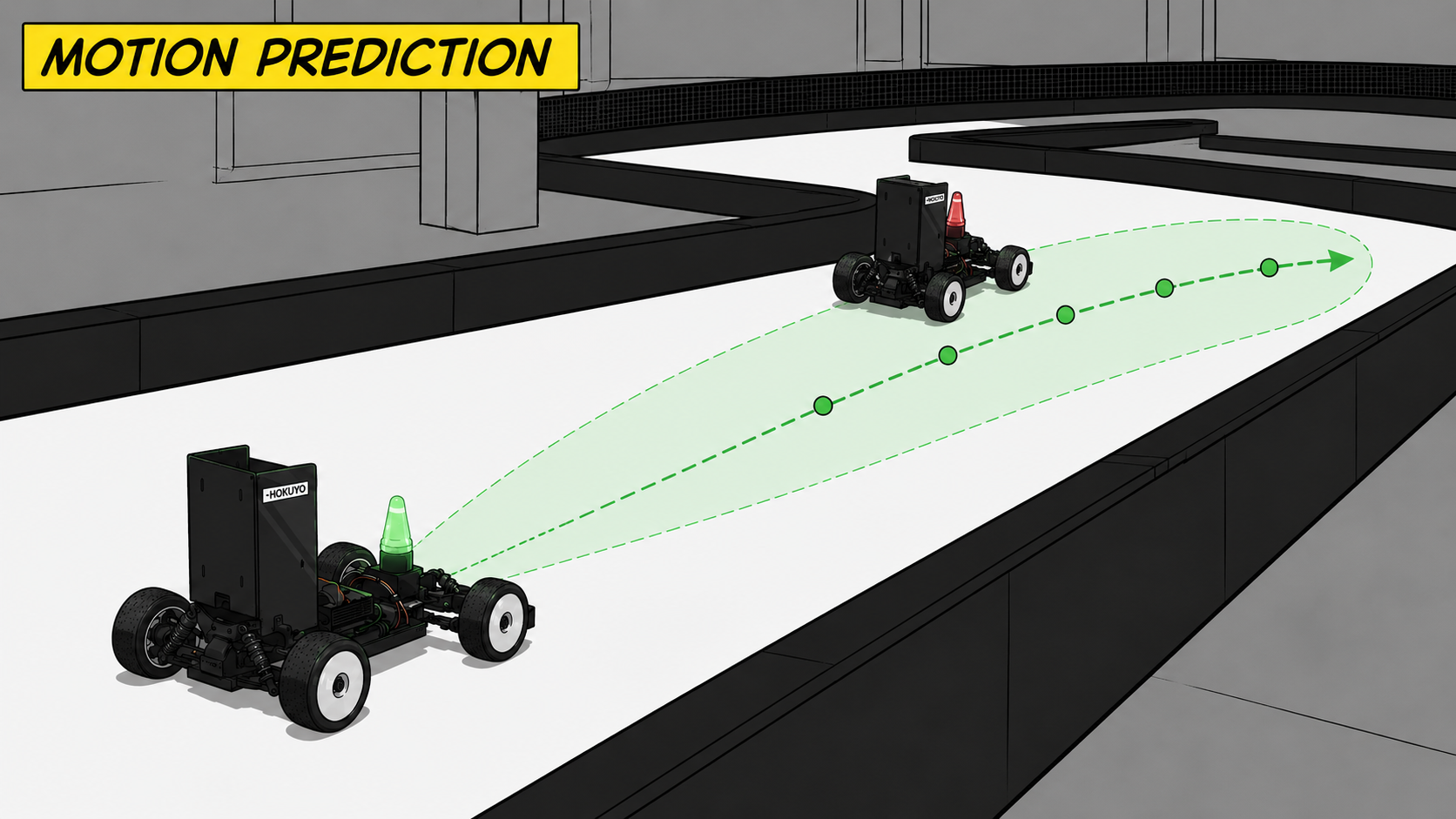
gp_traj_predictor는 tracking이 검출한 상대 차량의 움직임을 학습해 상대의 주행 라인을 만들고, planner가 쓸 미래 obstacle prediction을 생성합니다. 핵심은 상대 위치를 Frenet 좌표( $s$ =진행거리, $d$ =횡방향 편차)로 다루는 것. ① 원리 상대 관측을 $(s, d, v_s, v_d)$ 로 모...
gp_traj_predictor는 tracking이 검출한 상대 차량의 움직임을 학습해 상대의 주행 라인을 만들고, planner가 쓸 미래 obstacle prediction을 생성합니다. 핵심은 상대 위치를 Frenet 좌표( $s$ =진행거리, $d$ =횡방향 편차)로 다루는 것. ① 원리 상대 관측을 $(s, d, v_s, v_d)$ 로 모...
gp_traj_predictor learns the motion of the opponent detected by tracking to build the opponent’s driving line, and produces the future obstacle prediction that the planner uses. The key is handling...
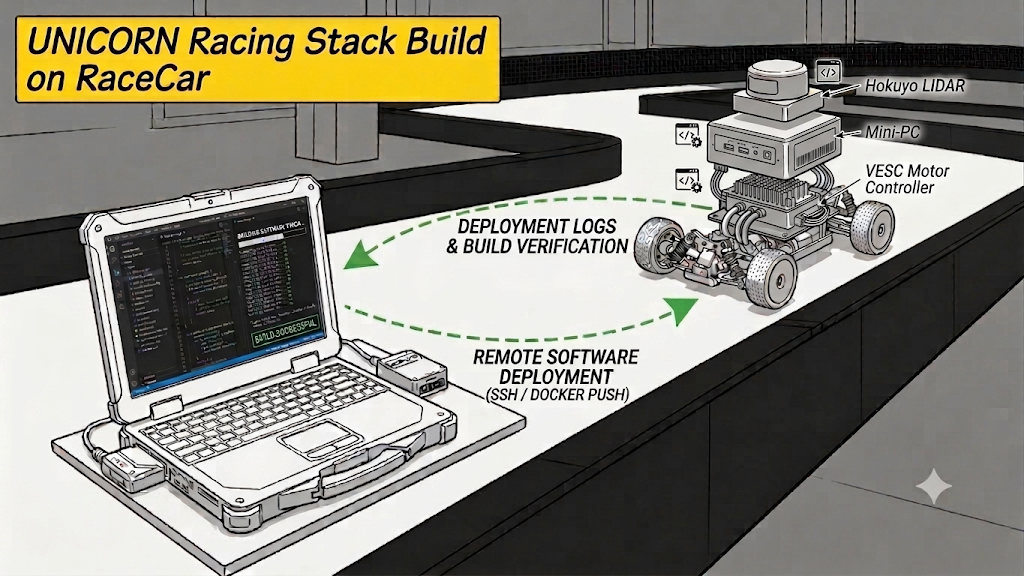
실제 차량(RaceCar)에서 UNICORN Racing Stack을 빌드하고, LiDAR·VESC 설정과 원격 제어(CycloneDDS)까지 구성하는 전체 과정을 정리했습니다. 전체 코드는 UNICORN Racing Stack 저장소에서 확인할 수 있습니다. 시뮬레이션·원격 제어용 노트북 빌드는 시뮬레이션과 원격 레이스 제어를 위한 UNICO...
This guide covers the full process of building the UNICORN Racing Stack on the actual vehicle (RaceCar), configuring the LiDAR and VESC, and setting up remote control with CycloneDDS. The full sour...
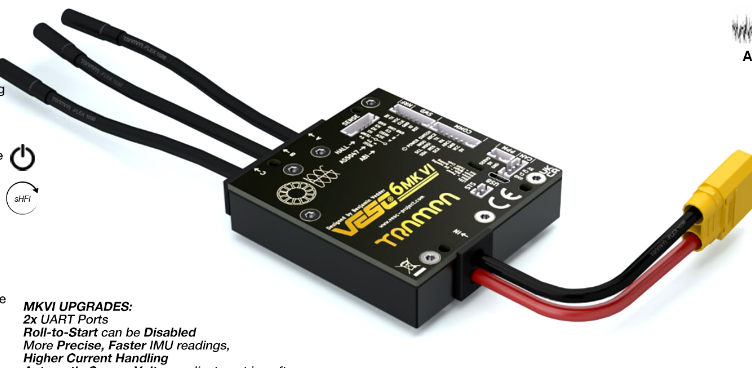
VESC를 차량에 연결한 뒤, 시리얼 포트를 찾아 지정하고 ROS 2에서 모터·서보·센서 연결을 확인하는 과정을 정리했습니다. 1. VESC 포트 찾기 Option 1. 직접 포트 찾기 ls /dev/ VESC는 ttyACMx 중 하나입니다. USB 연결 장치가 여러 개이면 ttyACM0, ttyACM1과 같이 순서대로 이름이 붙습니다. ...
After connecting the VESC to the vehicle, this guide walks through finding and assigning its serial port, then checking the motor, servo, and sensor connections in ROS 2. 1. Find the VESC Port Op...

Hokuyo LiDAR를 차량에 연결하고, static IP 설정부터 ROS 2에서 스캔 데이터를 확인하는 것까지의 과정을 정리했습니다. LiDAR의 IP를 모르는 경우, Wireshark를 이용한 LiDAR 센서 IP 주소 확인 방법을 먼저 참고하세요. 1. Static IP 설정 LiDAR와 연결된 보드의 이더넷을 static IP...
This guide walks through connecting a Hokuyo LiDAR to the vehicle, from configuring a static IP to checking the scan data in ROS 2. If you don’t know the LiDAR’s IP address, first see How to Fi...
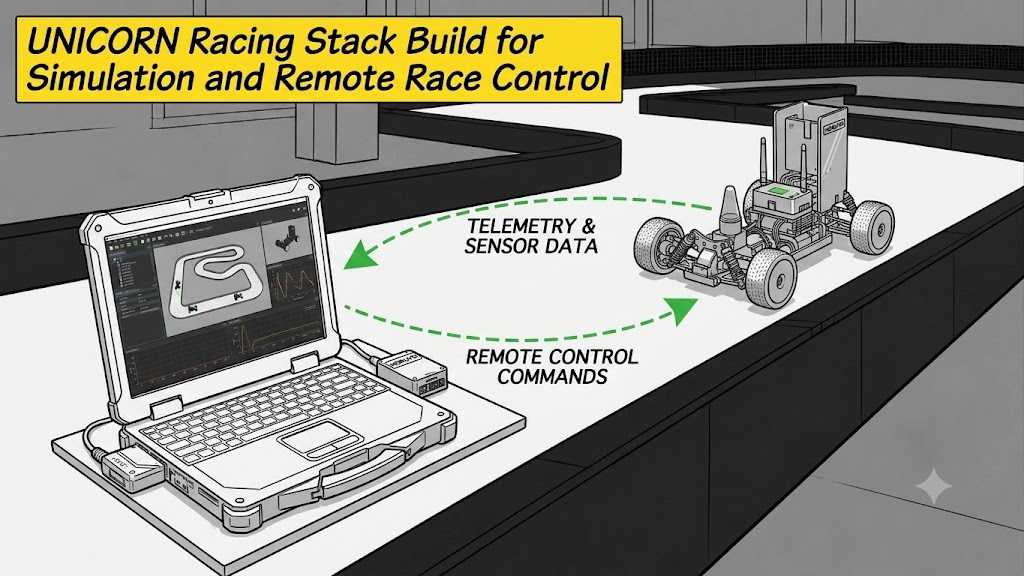
실제 차량 없이도 노트북에서 시뮬레이션을 돌리거나 원격으로 레이스를 제어할 수 있도록, UNICORN Racing Stack을 빌드하는 방법을 정리했습니다. 전체 코드는 UNICORN Racing Stack 저장소에서 확인할 수 있습니다. 이 가이드는 노트북/시뮬레이션용 빌드입니다. 하드웨어 전용 노드와 매핑·로컬라이제이션은 제외하고 빌드됩니다...
This guide explains how to build the UNICORN Racing Stack so you can run simulations or control a race remotely from your laptop, without a physical vehicle. The full source is available in the UNI...